Yaskawa MP920 Motion Module User Manual
Page 140
4 Parameters
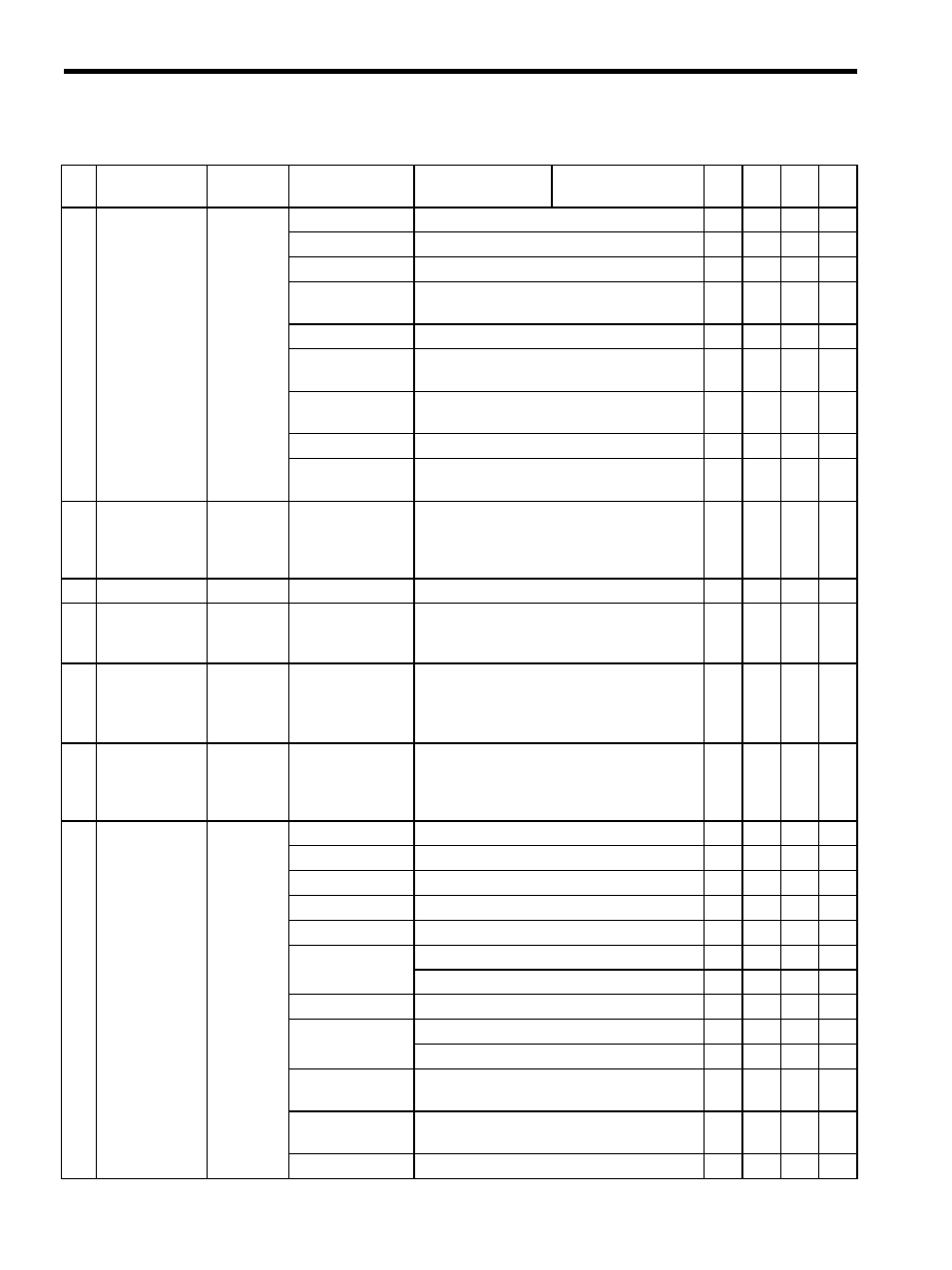
4.2.3 Motion Monitoring Parameters
4-20
24
Position Control
Status
(POSSTS)
IW17
Bit 0: MLKL
Machine Locked
√
√
√
√
Bit 1: ZERO
Zero Point Position
√
√
√
√
Bit 2: PSET2
Second In-position Completed
√
√
√
√
Bit 3: ABSLDE
ABS System Infinite Length Position Control
Data Load Completed
√
√
√
−
Bit 4: TPRSE
Preset no. of POSMAX Turns Completed
√
√
√
√
Bit 5: GEARM
Copies Motion Fixed Parameter “Electronic
Gear Enabled Selection.”
√
√
√
√
Bit 6: MODSELM
Copies motion fixed parameter “Axis Selec-
tion.”
√
√
√
√
Bits 7 to 11
Not used.
−
−
−
−
Bits 12 to 15:
USRMONSELR
Servo Driver User Monitor Information
Selection Response
−
−
√
−
25
Machine Coor-
dinate System
Reference Posi-
tion (MPOS)
IL18
-2
31
to 2
31
-1
1 = 1 pulse for pulse unit
Will not be updated if the machine is locked.
√
√
√
√
27
Not used.
IL1A
−
−
−
−
−
−
29
POSMAX
Monitor
(PMAXMON)
IL1C
1 to 2
31
-1
1 = 1 reference unit
Copies motion fixed parameter “POSMAX.”
√
√
√
√
31
Number of POS-
MAX Turns
(PMAXTURN)
IL1E
-2
31
to 2
31
-1
1 = 1 rotation
Raises or lowers the count each time POSMAX
is exceeded.
(Initializes to 0 at startup.)
√
√
√
√
33
Servo Driver
User Monitor
Information
(USRMON)
IL20
-2
31
to 2
31
-1
Refer to the relevant servo drive user’s manuals.
−
−
√
−
35
Alarms
(ALARM)
IL22
Bit 0: SVERROR
SERVOPACK Error
−
−
√
−
Bit 1: OTF
Positive Overtravel
√
√
√
−
Bit 2: OTR
Negative Overtravel
√
√
√
−
Bit 3: SOTF
Positive Software Limit
√
√
√
√
Bit 4: SOTR
Negative Software Limit
√
√
√
√
Bit 5: SVOFF
Servo OFF
−
−
√
−
Excitation OFF
−
−
−
√
Bit 6: TIMEOVER Positioning Time Over
√
√
√
−
Bit 7: DISTOVER
Positioning Travel Distance Over
−
−
√
−
Overspeed
−
−
√
Bit 8:
FILTYOERR
Filter Type Change Error
−
−
√
−
Bit 9:
FILTYMERR
Filter Time Constant Change Error
−
−
√
−
Bit 10: MODERR
Control Mode Error
√
√
√
√
Table 4.4 Motion Monitoring Parameters (cont’d)
No.
Name
Register
Number
Setting Range
(Bit Name)
Meaning
Remarks
SVA
-01A
SVA
-02
A
SVB
-01
PO-
01