Yaskawa MP920 Motion Module User Manual
Page 134
4 Parameters
4.2.2 Motion Setting Parameters
4-14
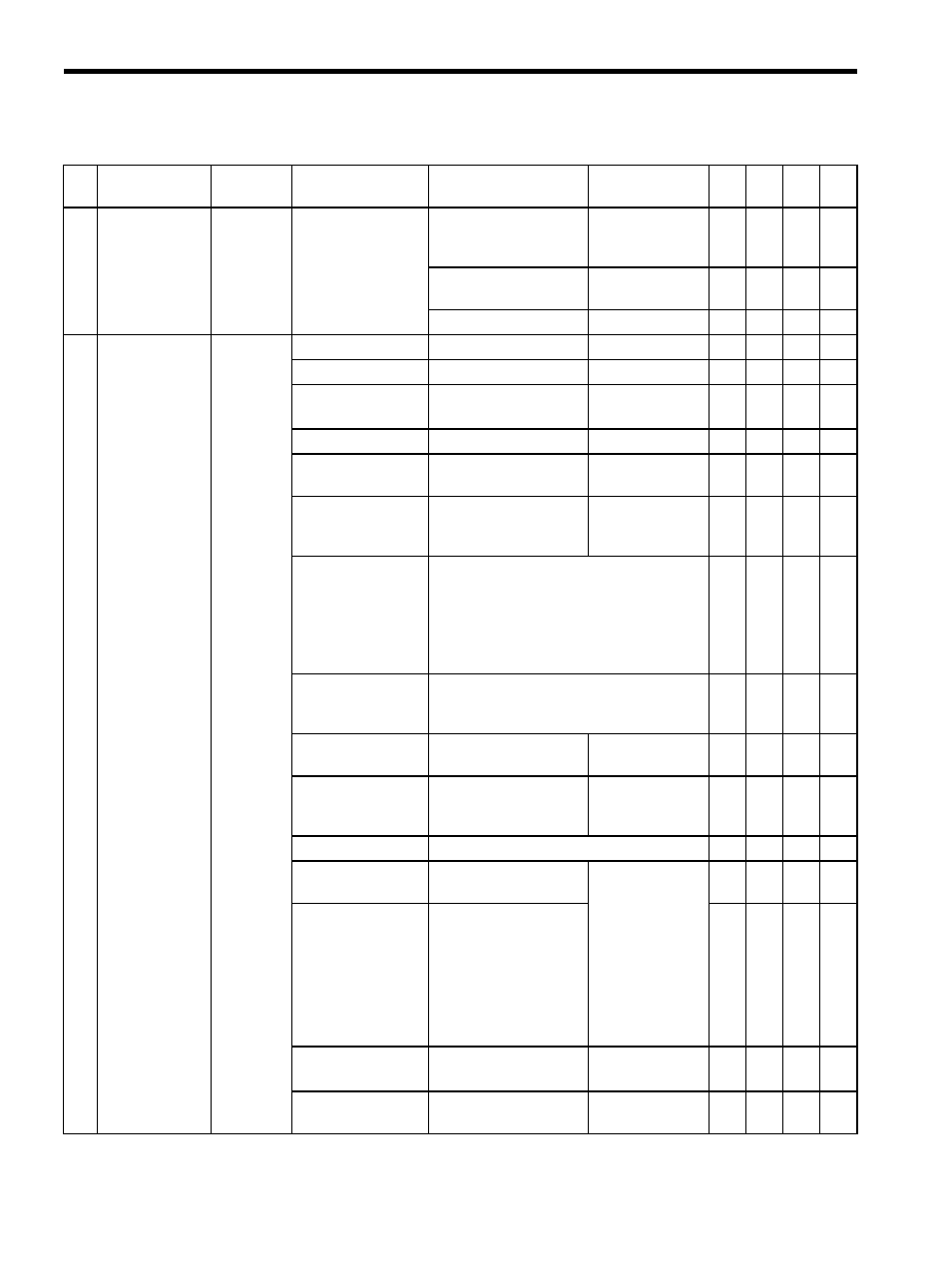
33
Motion
Command Code
(MCMDCODE)
(cont’d)
OW20
0 to 65535
(Default = 0)
20: AMHIST_MON
Monitor current
servo driver alarm
history
−
−
√
−
21: ALMHIST_CLR
Clear servo driver
alarm history
−
−
√
−
22 to 65535: Not used
−
−
−
−
34
Motion Com-
mand Control
Flags
(MCMDCTRL)
(Default = 0, all
bits OFF)
OW21
Bit 0: HOLD
Command Hold
0: OFF, 1: ON
√
√
√
√
Bit 1: ABORT
Command Abort
0: OFF, 1: ON
√
√
√
√
Bit 2: DIRECTION
Direction of Movement
For JOG and STEP
0: Forward
1: Reverse
√
√
√
√
Bit 3: P_PI
Speed Loop P/PI Switch
0: PI, 1: P
−
−
√
−
Bit 3: REMCUT
No Feed Speed Remain-
der Compensation
0: OFF, 1: ON
−
−
−
√
Bit 3: LAGRST
No Primary Lag (Same
as primary lag time
constant = 0)
0: OFF, 1: ON
√
√
−
−
Bits 4 to 7:
FILTERTYPE
Filter Type Selection
0: No filter.
1: Exponential filter (exponential accelera-
tion/deceleration)
2: Movement averaging filter (simple
S-curved acceleration/deceleration)
√
√
√
√
Bit 8: POS_PPI
Position Loop P/PI Switch
0: P
1: PI
√
√
−
−
Bit 9: POS_IRST
Position Control
Integration Reset
0: OFF, 1: ON
√
√
−
−
Bit 10: NCOMSEL
Speed Compensation
(OW18) during
Position Control
0: OFF, 1: ON
√
√
−
−
Bit 11: Not used.
−
−
−
−
−
Bit 12: LMT_L
Reverse Limit Signal for
Zero Point Return
These bits are
valid only when
bits 3 and 4 of
fixed parameter
No. 14 (Addi-
tional Function
Selections) are set
to 0 (Use
OB21).
0: OFF, 1: ON
√
√
−
√
Bit 13: LMT_R
Forward Limit Signal for
Zero Point Return
√
√
−
√
Bit 14: BUF_W
Position Buffer Write
0: OFF
1: ON
√
√
√
√
Bit 15: BUF_R
Position Buffer Read
0: OFF
1: ON
√
√
√
√
Table 4.3 Motion Setting Parameters (cont’d)
No.
Name
Register
Number
Setting Range/
Bit Name
Meaning
Remarks
SVA
-01A
SVA
-02
A
SVB
-01
PO-
01