2 svb-01 parameters, 1 motion fixed parameters – Yaskawa MP920 Motion Module User Manual
Page 251
6 SVB Module Specifications and Handling
6.2.1 Motion Fixed Parameters
6-16
6.2
SVB-01 Parameters
6.2.1
Motion Fixed Parameters
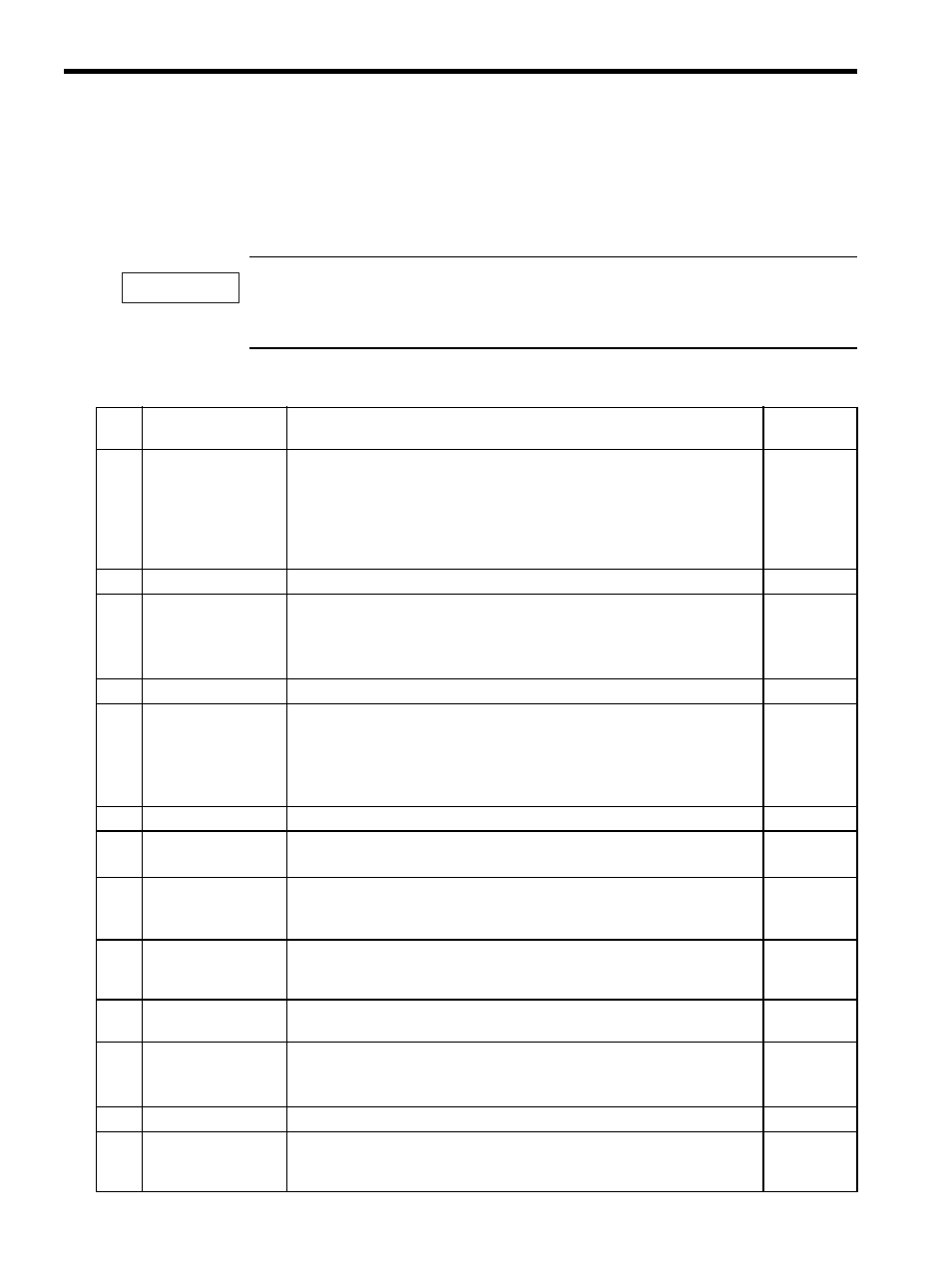
Motion fixed parameters cannot be changed if the current value of bit 0 is ON in motion setting param-
eter OW01, RUN Command Settings.
Positions and other data are initialized when a motion fixed parameter is changed.
IMPORTANT
Table 6.2 Motion Fixed Parameters
No.
Name
Description
Factory
Setting
1
Axis Selection
(USESEL)
Set whether an axis is used or not.
0: Not used.
1: Used.
If an axis is set to be not used, then that axis will not be controlled and IW00
to IW3F monitoring parameters will not be refreshed. “0” will be stored at
IW00 RUN Status.
0
(Not used)
2
Not used.
−
−
3
Encoder Selection
(ENCSEL)
Set the type of encoder that is used.
0: Incremental encoder
1: Absolute encoder
2: Absolute encoder used as incremental encoder
0
(Incremental
encoder)
4
Not used.
−
−
5
Pulse Counting
Mode Selection
(PULMODE)
Set the pulse counting method. Set one of the following seven modes to match
the pulse read method for the system that is used.
4: A/B pulses mode,
× 1
5: A/B pulses mode,
× 2
6: A/B pulses mode,
× 4
6
(A/B pulses
×
4)
6
Not used.
−
−
7
Rated Motor Speed
Setting (NR)
Set motor speed at rated (100%) operation in 1 min
-1
units. Set this parameter
based on the specifications of the Servomotor that is used.
3000
8
Number of Feedback
Pulses per Rotation
(FBppr)
Set the number of feedback pulses per Servomotor rotation (no multiplier). Set
this parameter based on the specifications of the encoder that is used.
• Setting range: Set a multiple of 4 between 4 and 65532 (p/r).
2048
9
Number of Feedback
Pulses per Rotation
(For high-resolution)
Set the number of encoder pulses per Servomotor rotation without multiplica-
tion.
2048
10 to
13
Not used.
−
−
14
Additional Function
Selections
Bit 9: Number of encoder pulses setting selection
0: Fixed parameter No. 8
1: Fixed parameter No. 9
−
15
Not used
−
−
16
Simulation Mode
Selection
(SIMULATE)
0: Normal operation mode
1: Simulation mode
0