Triton Isis User Manual
Page 146
June 2004 Isis® Sonar User's Manual, Volume1
132
Unless you are sending a true towfish position to Isis during data acquisition, you
need to account for the difference between the ship's reference position and the
towfish position. This can be achieved using the View→Layback option in Isis,
which will write a layback value into your XTF file either based on your estimate
of the values or by reading serial data from a cable counter sensor and the
towfish depth sensor. See the description for navigation template tokens:
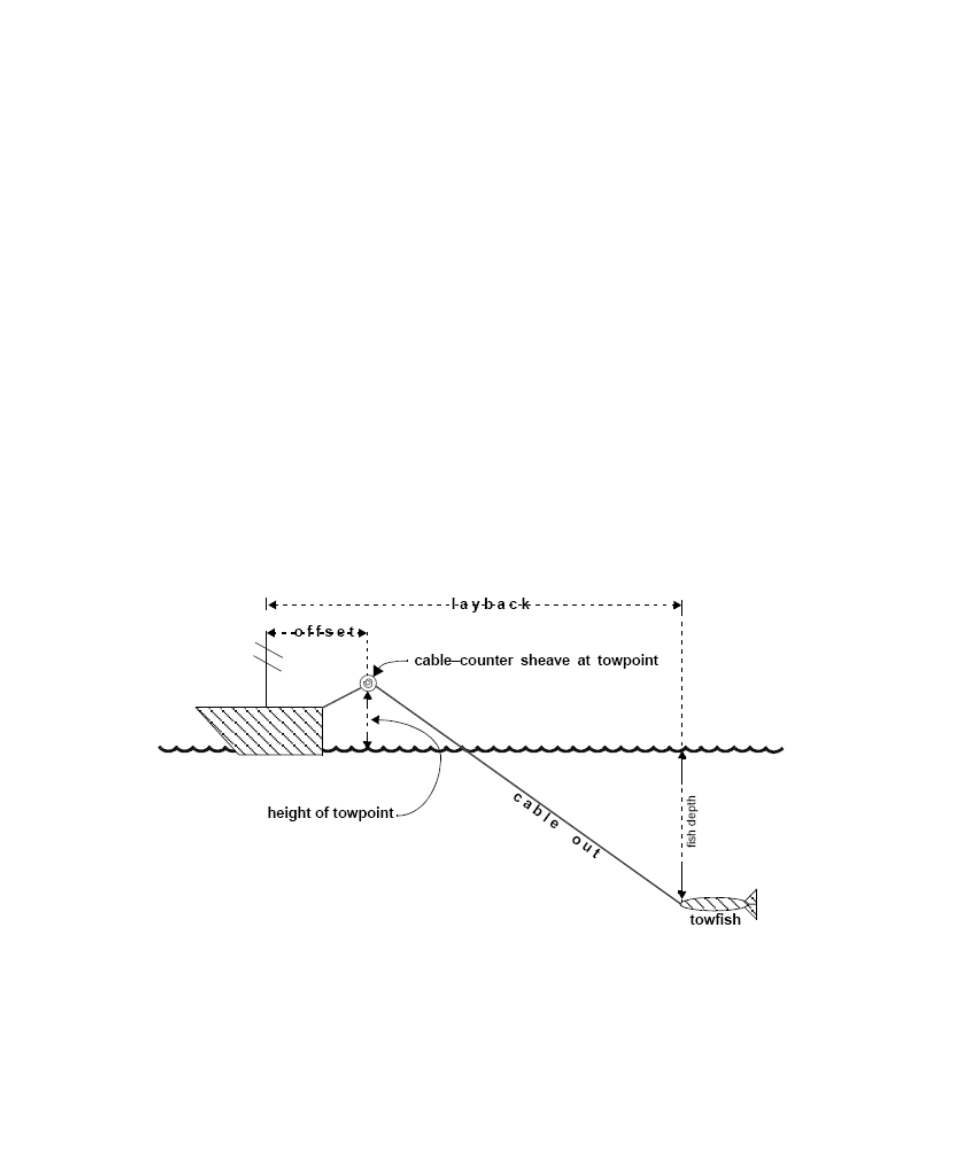
• o (small “oh”) = cable out
• l (small “ell”) = layback
• 0 (zero) = towfish depth
A layback value can either be recorded into a file during a recording session or a
new value applied to a file that has already been recorded.
It is important to note that Isis never modifies the original navigation data;
instead, the layback data (if any) are simply stored in the XTF file and can be
applied to the raw navigation when required.
All values must be in meters
.
Figure 8-8: Layback, cable out, fish depth, and offset relationships
Chapter 8: Using the View Menu