Dynamics (ascii), Table 62: dynamic modes mapping and applications – NavCom Sapphire Rev.J User Manual
Page 93
Sapphire Technical Reference Manual Rev. J
93
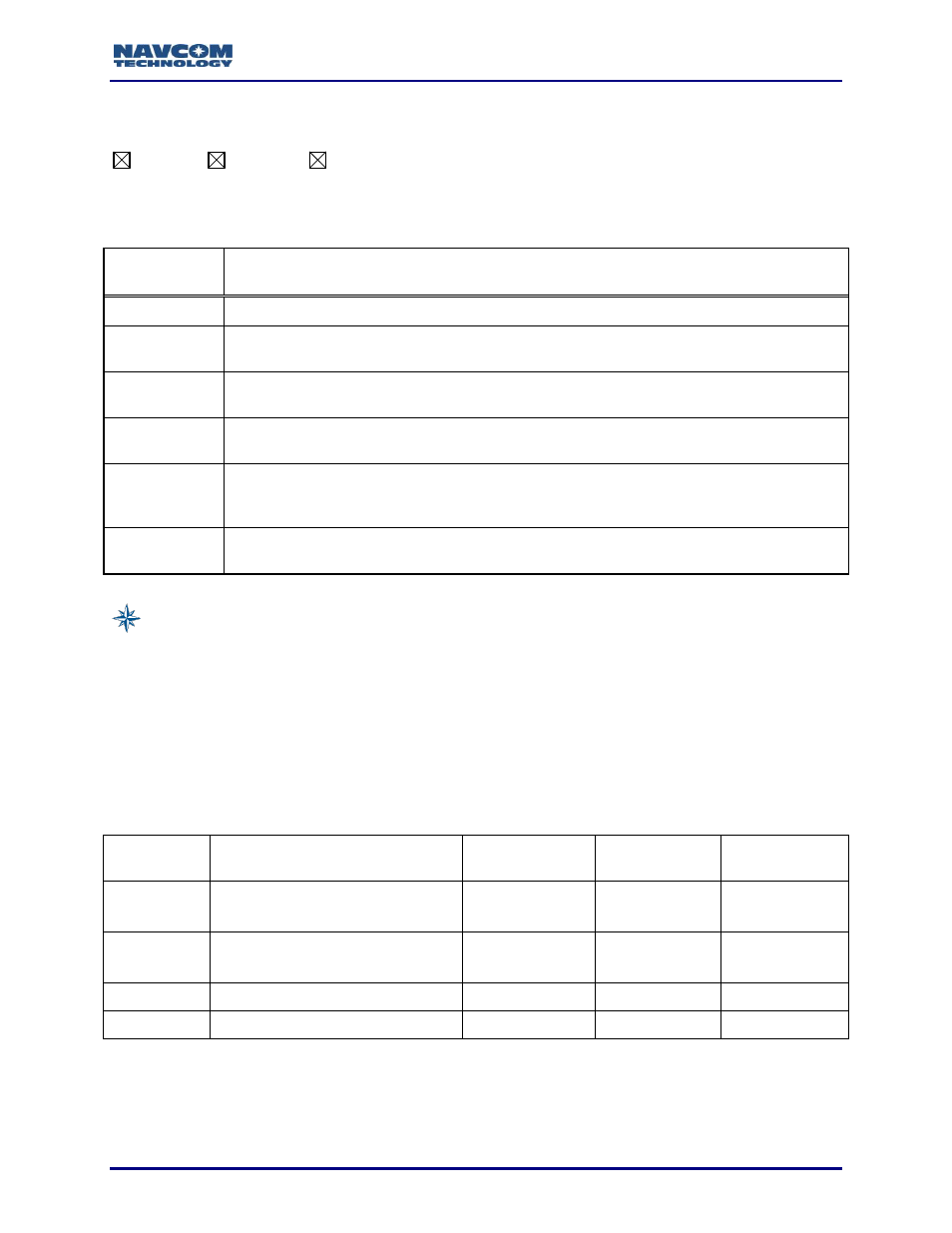
1.39 DYNAMICS (ASCII)
SF-3050
Sapphire
SF-3040
This command is used for specifying receiver dynamics. The setting affects the RTK rover
dynamic, the RTG (StarFire) dynamic, and the velocity smoothing settings. Refer to Table 62 for
guidance on the various settings.
Command:
[DYNAMICS] dynamic_mode, {rtk_dynamic_mode}, {rtg_dynamic_mode},
{velocity_smoothing}
Parameter
Definition
Static
Keyword that configures RTK rover and RTG mode to use static dynamic constraints in
navigation
Low
Keyword that configures RTK rover and RTG mode to use low dynamic model in
navigation. It achieves the best navigation performance in near-static mode.
Medium
Keyword that configures RTK rover and RTG mode to use medium dynamic model in
navigation. It achieves the best navigation performance in normal dynamic conditions.
High
Keyword that configures RTK rover and RTG mode to use high dynamic model in
navigation. It achieves the best navigation performance when the platform experiences
high accelerations.
User
Keyword that configures additional user parameters: the RTK rover dynamic, the RTG
dynamic, and the velocity smoothing settings
Default: Medium
Dynamic_mode is the receiver overall dynamic setting. When a user specifies
dynamic_mode as STATIC, LOW, MEDIUM, or HIGH, the receiver uses the built-in
settings in Table 62 for the RTK rover, the RTG dynamic, and velocity smoothing.
No additional parameters are needed. However, when a user specifies dynamic
mode as USER, the user can add specific parameters to configure the RTK rover,
the RTG dynamic, and the velocity smoothing settings.
Table 62: Dynamic Modes Mapping and Applications
Dynamic
Mode
Typical Application
RTK Rover
Dynamic Mode
RTG
Dynamic Mode
Velocity
Smoothing
Static
Static land survey ~ 0 mph
STATIC
STATIC
OFF
ON (default)
Low
Tractor/offshore Survey <5 mph
LOW
LOW
OFF
ON (default)
Medium
Highway <100 mph
MEDIUM
MEDIUM
OFF
High
Aerial platform >100 mph
HIGH
HIGH
OFF
The settings in Table 62 assume that the receiver is navigating at a rate of 1 Hz. As
a rule of thumb, the higher the rate at which the receiver navigates, the higher the
dynamics the settings can accommodate.