Nmeattm (ascii), Table 159: ttm message output format – NavCom Sapphire Rev.J User Manual
Page 325
Sapphire Technical Reference Manual Rev. J
325
2.72 NMEATTM (ASCII)
SF-3050
Sapphire
SF-3040
Supported Output Rate:
OFF
ONCE
OnChange
OnTime
OnChange
= based on [MBRTK1B]
OnTime
= highest rate licensed
This output stream is only supported on an MBRTK Rover and displays baseline information
including the baseline distance, bases speed and direction, and closest point of approach based
on NMEA 0183 Standards version 4.0.
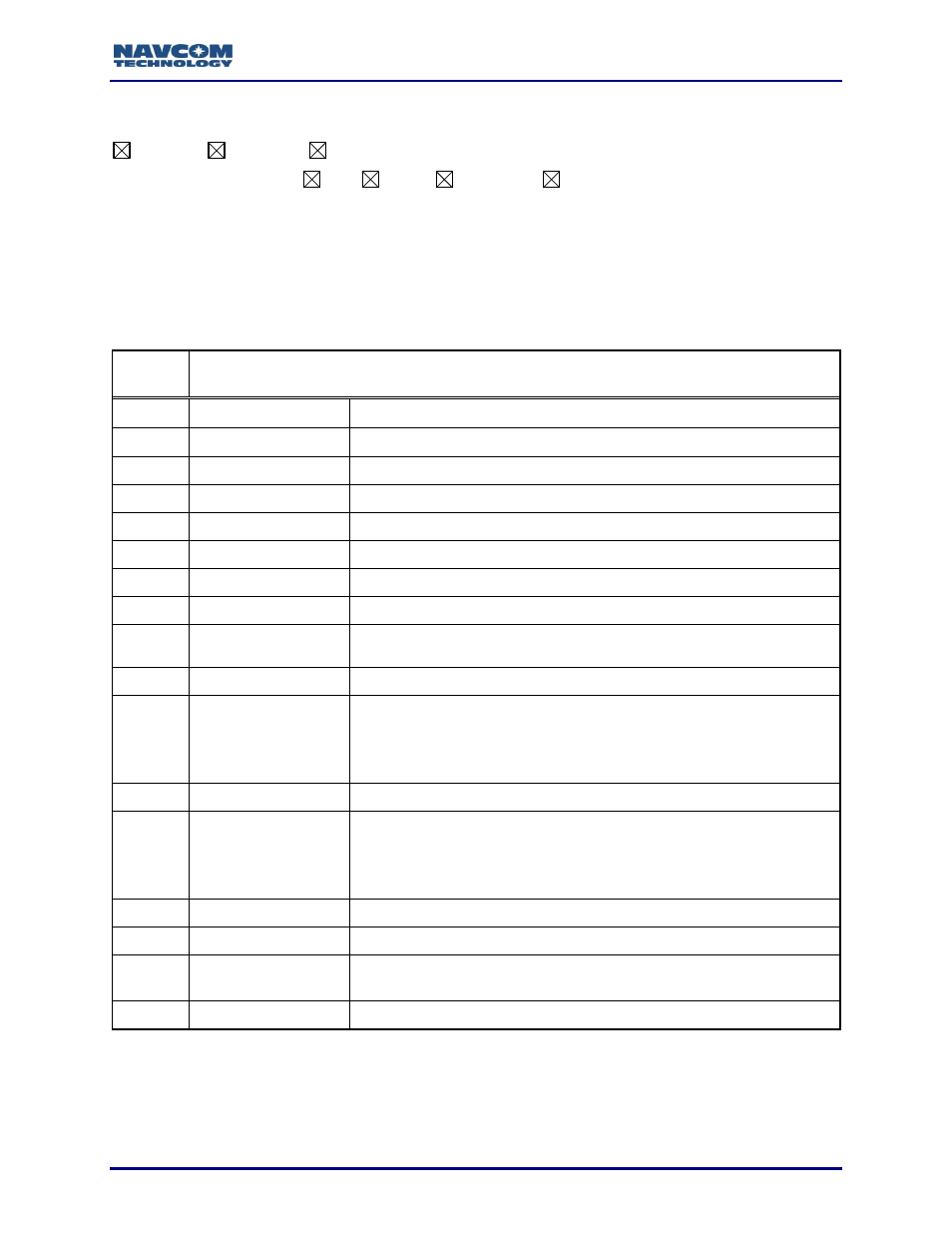
Table 159: TTM Message Output Format
Output
Format:
$GNTTM,
Base Number,Base Distance,…,UTC,Type of Acq,*hh
Field#
Field Name
Description
F1
Base Number
Last 2 digits of the MBRTK BaseID
F2
Base Distance
3D Baseline Distance (m)
F3
Base Bearing
Base 2D bearing from the Rover, N=0
o
, E=90
o
(0
o
-360
o
)
F4
Bearing Units
True or Relative (T/R), R is not supported
F5
Base Speed
3D speed of the Base (m/s)
F6
Base Coruse
Base 2D direction, N=0
o
, E=90
o
(0
o
-360
o
)
F7
Course Units
True or Relative (T/R), R is not supported
F8
CPA Dist
Distance at the closest point of approach, this is how close the Base
and Rover would ever get given their course and speed in 2D (m)
F9
CPA Time
Time until 2D CPA, - means it has passed (min)
F10
Speed/Dist Units
Units of measurements used:
K = Kilometers (metric, used)
N = Knots (unused)
S = Statute miles (unused)
F11
Base Name
Full Base ID
F12
Base Link Status
Tracking status of the Base:
L = Lost track of Base (Non RTK Mode)
Q = Query, acquiring (RTK Float)
T = Tracking (RTK Fixed)
F13
Tracking Ref
R if base is used to determine own position (always true)
F14
UTC
Standard UTC time (hhmmss.ss)
F15
Type of Acqusition
A = Automatic (used)
M = Manual (unused)
F16
*CRC
Checksum
Example: $GNTTM,30,16.75,134.27,T,0.03,34.96,T,15.99,2.63,K,530,T,R,201345.00,A*45
There will be some noise in the base velocity due to the baseline velocity of the rover. This
noise will increase if the rover is moving in a non-linear path.