External position, Robotic arm – Metrohm 840 PC Control 5.0 / Touch Control User Manual
Page 74
3.10 Device manager
62
PC Control / Touch Control
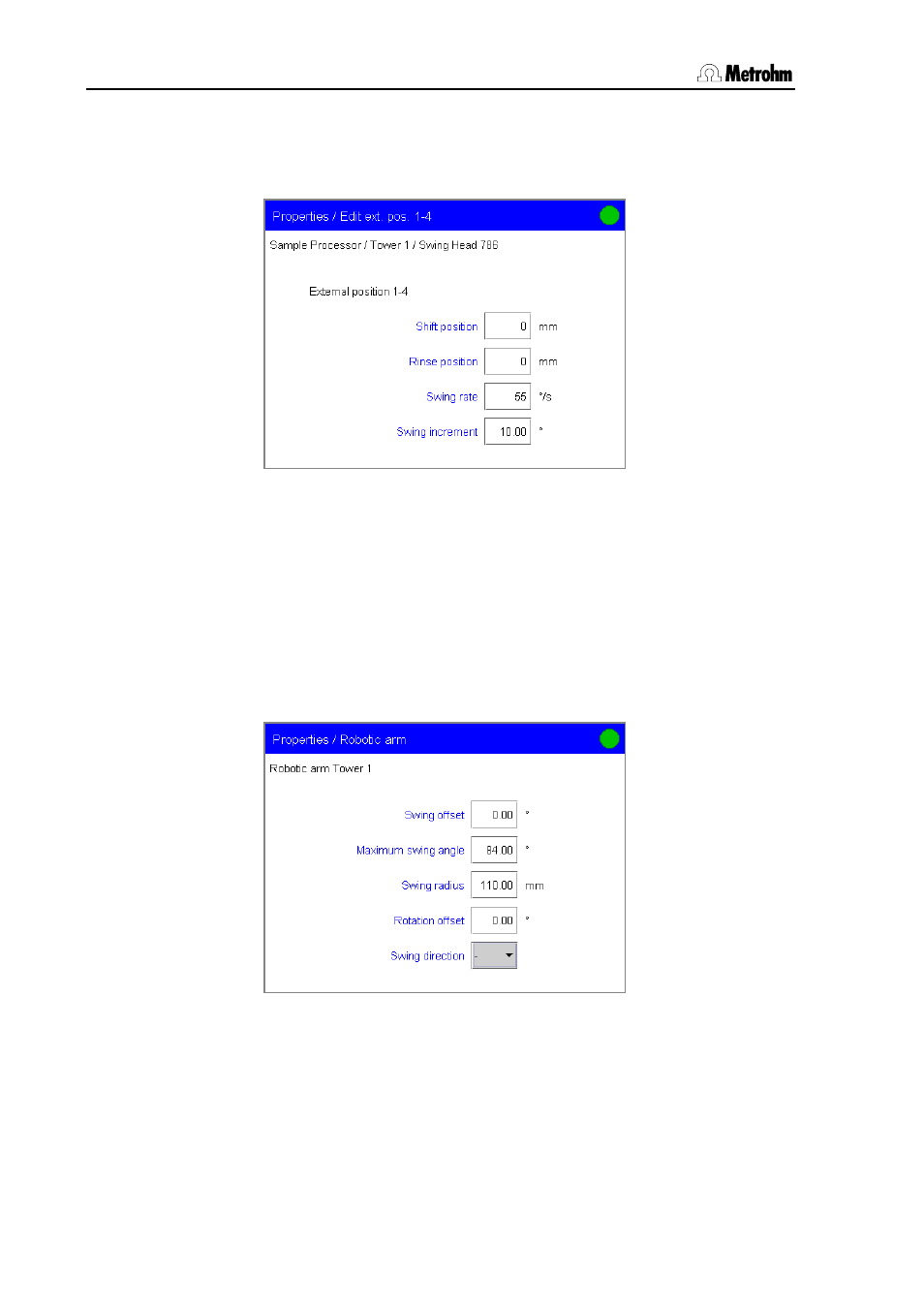
External position
[Ext. pos. 1-4] can be used to assign shift and rinse positions
that are valid for all four external positions.
• The swing rate is the rate at which the robotic arm is swung when
moving to a rack position, a special beaker or an external position.
In manual control and in the command MOVE this rate can be
adjusted individually.
• The swing increment is the angle about which the robotic arm
should be swung relatively to the momentary position. This swing
increment is used for the settings + swing and – swing in the
MOVE command.
Robotic arm
The settings of the robotic arm are listed under [Robotic arm].
• Swing offset: The swing offset is a physical angle offset of a
specific robotic arm model. The required values can be found in the
leaflet for the robotic arm.
• Maximum swing angle: The usable swing range of the robotic arm
is defined by this parameter. Because of its construction each
robotic arm model has a different value which can be reduced if
necessary. The required values can be found in the leaflet for the
robotic arm.