Pump, Lift – Metrohm 840 PC Control 5.0 / Touch Control User Manual
Page 200
3.24 Manual control
188
PC Control / Touch Control
The two arrows [u] and [v] can be used to move the lift directly up
and down for as long as the button is kept pressed down. The
current lift position is shown continuously.
[Previous] and [Next] rotates the previous or next rack position
such that it is placed in front of the selected tower or robotic arm.
Pump
Activate [Pump] in order to access the control of the pumps. You
can now turn the pumps on and off. Two pumps that can be
controlled are always shown for each tower. Two connections for
external pumps are available if no pumps are installed.
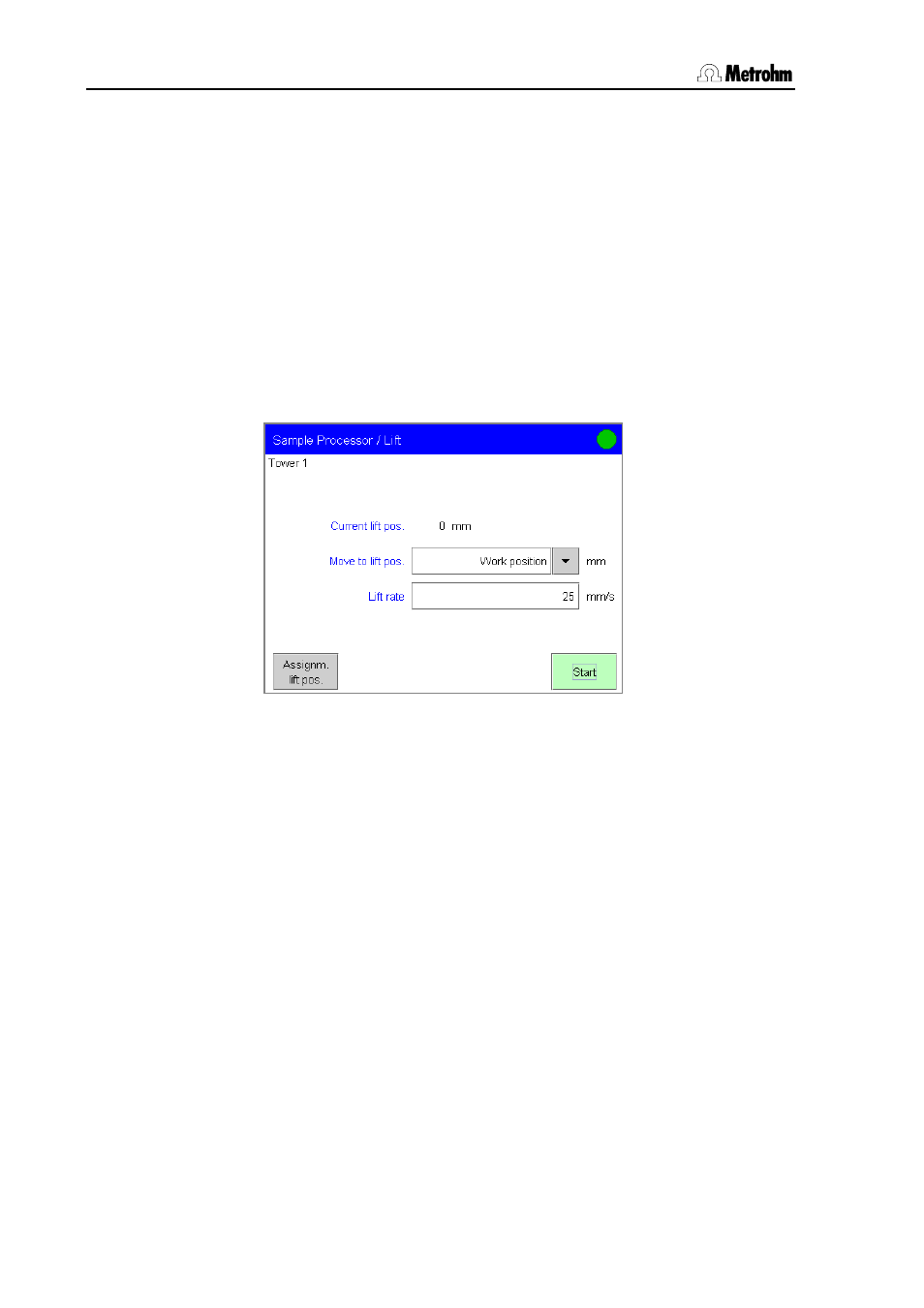
Lift
With [Lift] you can access the control of the lift.
Select the predefined lift positions under Move to lift pos. or
enter the required lift position and press [Start]. The lift is moved
to the required position.
The rate defined under Lift rate is only valid for manual control. A
separate lift rate can be defined in the command LIFT for automatic
operation.
The predefined lift positions are specified in the Device manager in the
current rack table (see Section 3.10.5). They can also be assigned
directly here:
Move the lift to the position that you want to set as a new predefined
lift position. Either use the [u] and [v] buttons or enter the required
lift position in mm in the subdialog Lift and press [Start].
With [Assignm. lift pos.] you can access the predefined lift
positions that you can now assign to the current lift position.
Depending on the current rack position, each lift position that can
be set is now available:
General rack position (not an external position, not a special beaker):
A work position, a shift position, a rinse position and a special position
can be defined for general rack positions.