Rockwell Automation 2094-xMxx-S Kinetix 6000 Multi-axis Servo Drives User Manual User Manual
Page 96
96
Rockwell Automation Publication 2094-UM001H-EN-P - June 2013
Chapter 5
Connecting the Kinetix 6000 Drive System
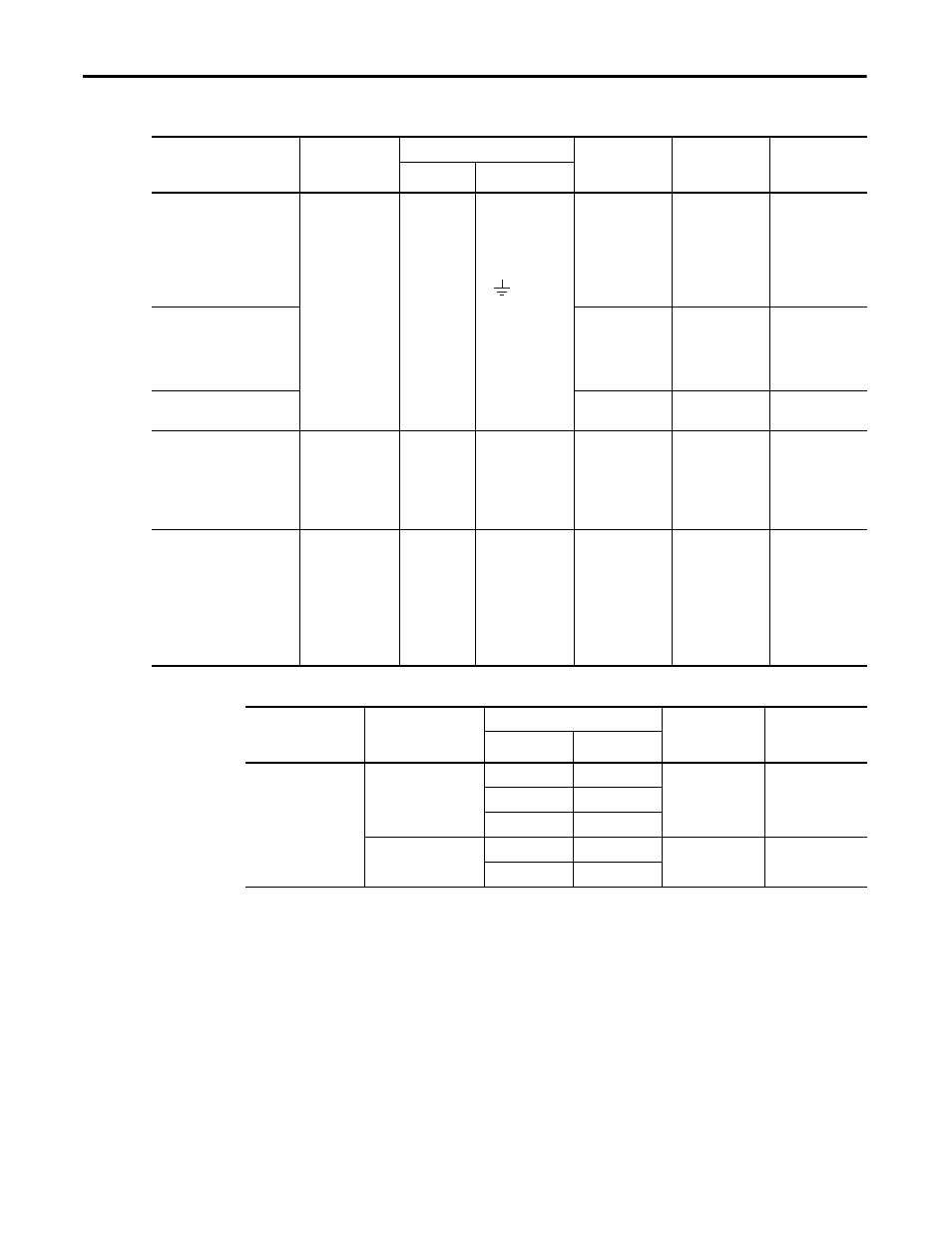
Table 59 - IAM/AM Power Wiring Requirements
Table 60 - Shunt Module Power Wiring Requirements
Kinetix 6000 Drive
Cat. No.
Description
Connects to Terminals
Recommended
Wire Size
mm
2
(AWG)
Strip Length
mm (in.)
Torque Value
N•m (lb•in)
Pin
Signal
2094-AC05-Mxx-x,
2094-AC09-M02-x,
2094-BC01-Mxx-x,
2094-BC02-M02-x,
2094-AMP5-x, 2094-AM01-x,
2094-AM02-x, 2094-BMP5-x,
2094-BM01-x, 2094-BM02-x
Motor power
MP-4
MP-3
MP-2
MP-1
Motor power cable
depends on motor/
drive combination.
6…1.5
(10…16)
10 (0.38)
0.5…0.6
(4.4…5.3)
2094-AC16-M03-x,
2094-AC32-M05-x,
2094-BC04-M03-x,
2094-AM03-x, 2094-AM05-x,
2094-BM03-x
10…1.5
(8…16)
10 (0.38)
1.2…1.5
(10.6…13.2)
2094-BC07-M05-x,
2094-BM05-x
30…2.5
(3…14)
16 (0.63)
2.4…3.0
(21.6…26.5)
IAM or AM
(230 or 460V)
2094-xCxx-Mxx-x and
2094-xMxx-x
Brake power
BC-6
BC-5
BC-4
BC-3
BC-2
BC-1
MBRK-
MBRK+
COM
PWR
DBRK-
DBRK+
0.75 (18)
10 (0.38)
0.22…0.25
(1.9…2.2)
IAM or AM
(230 or 460V)
2094-xCxx-Mxx-S and
2094-xMxx-S
Safe torque-off
STO-1
STO-2
STO-3
STO-4
STO-5
STO-6
STO-7
STO-8
STO-9
FDBK2+
FDBK2-
FDBK1+
FDBK1-
SAFETY ENABLE2+
SAFETY ENABLE-
SAFETY ENABLE1+
24V +
24V_COM
0.75 (18)
(stranded wire with
ferrule)
1.5 (16)
(solid wire)
7.0 (0.275)
0.235 (2.0)
W
V
U
Drive Module Cat. No.
Description
Connects to Terminals
Recommended
Wire Size
mm
2
(AWG)
Torque Value
N•m (lb•in)
Pin
Signal
2094-BSP2
Shunt module
(200/400V-class)
1394-SRxxxx
External passive shunt
module
RC-1
DC+
10 (8)
(1)
1.2…1.5
(10.6…13.2)
RC-2
INT
RC-3
COL
Thermal switch
TS-1
TS1
0.75 (18)
0.22…0.25
(1.9…2.2)
TS-2
TS2
(1) 105 °C (221 °F), 600V.