Feedback specifications, Absolute position feature – Rockwell Automation 2094-xMxx-S Kinetix 6000 Multi-axis Servo Drives User Manual User Manual
Page 77
Rockwell Automation Publication 2094-UM001H-EN-P - June 2013
77
Connector Data and Feature Descriptions
Chapter 4
Feedback Specifications
The IAM and AM modules can accept motor and auxiliary feedback signals from
these types of encoders:
• Stegmann Hiperface
• TTL or Sine/Cosine with index pulse and Hall commutation
• Resolver Transmitter TR = 0.25 (motor feedback only)
Motor feedback from Heidenhain EnDat high-resolution encoders is also
accepted, but only when using drive firmware revision 1.116 and the 2090-
K6CK-KENDAT low-profile feedback module for EnDat to Hiperface
conversion.
Absolute Position Feature
The drive’s absolute position feature tracks the position of the motor, within the
multi-turn retention limits, while the drive is powered off. The absolute position
feature is available with only these multi-turn encoders.
Table 51 - Absolute Position Designator Examples
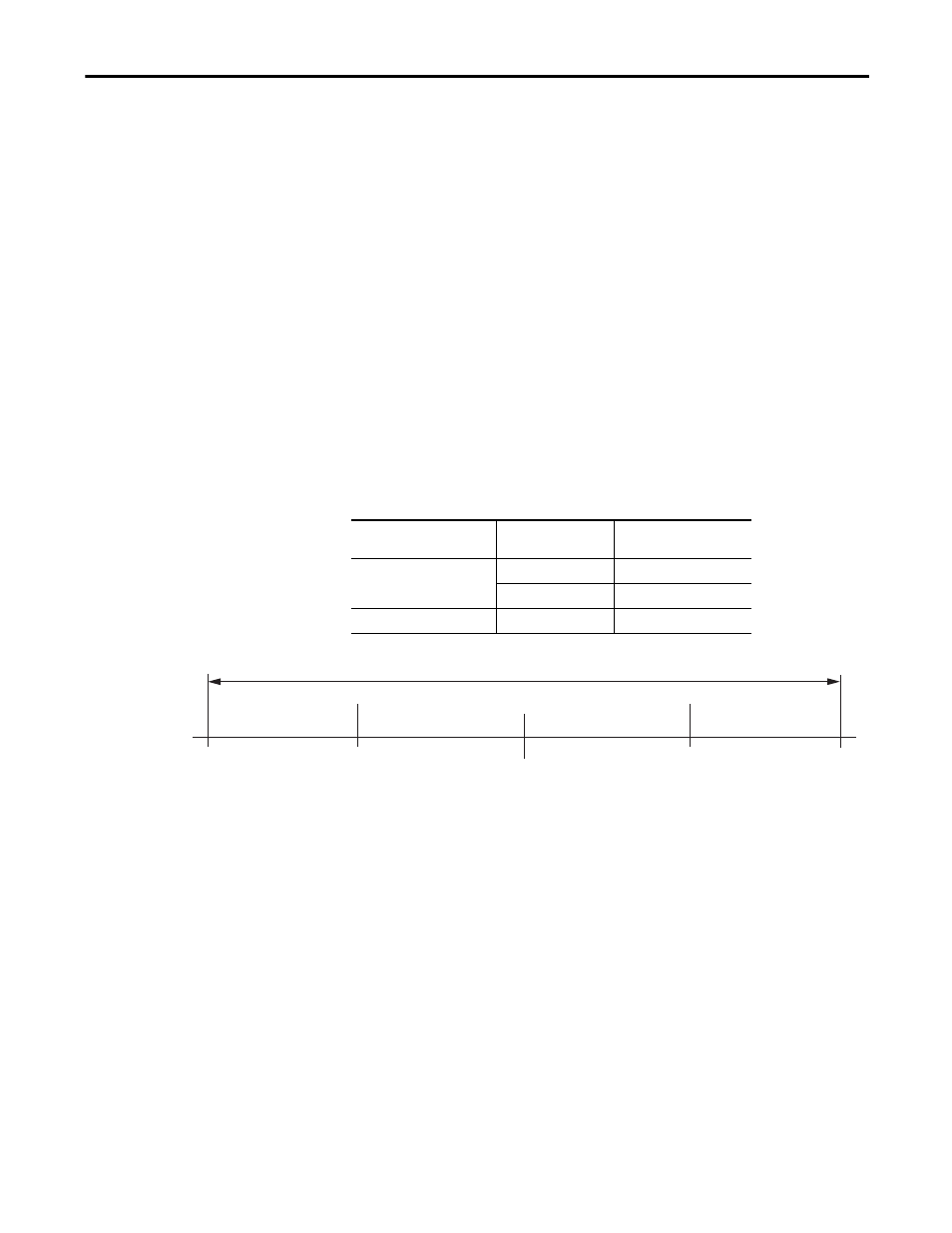
Figure 37 - Absolute Position Retention Limit
Encoder Type
Motor Cat. No.
Designator
Motor Cat. No. Example
Stegmann Hiperface
-M
MPL-B310P-M
-V
MPL-B230P-V
Heidenhain EnDat
-7
RDB-B21519-7
+2048
+1024
-2048
-1024
4096 Turns, Kinetix 6000 Drives
Position at Power Down