Rockwell Automation 2094-xMxx-S Kinetix 6000 Multi-axis Servo Drives User Manual User Manual
Page 258
258
Rockwell Automation Publication 2094-UM001H-EN-P - June 2013
Appendix F
Enhanced Peak Performance
4. Overwrite the existing TorqueLimitPositive and TorqueLimitNegative
values.
In this example, the calculated values are 178.1 and -178.1 (respectively).
The calculated value for Torque
max
is the maximum value for the
following:
• TorqueLimitBipolar
• TorqueLimitPositive (+)
• TorqueLimitNegative (-)
If you want to limit the torque, adjust the calculated values to a value closer
to zero. The values shown are the default values for 150% peak torque with
this motor and drive pair.
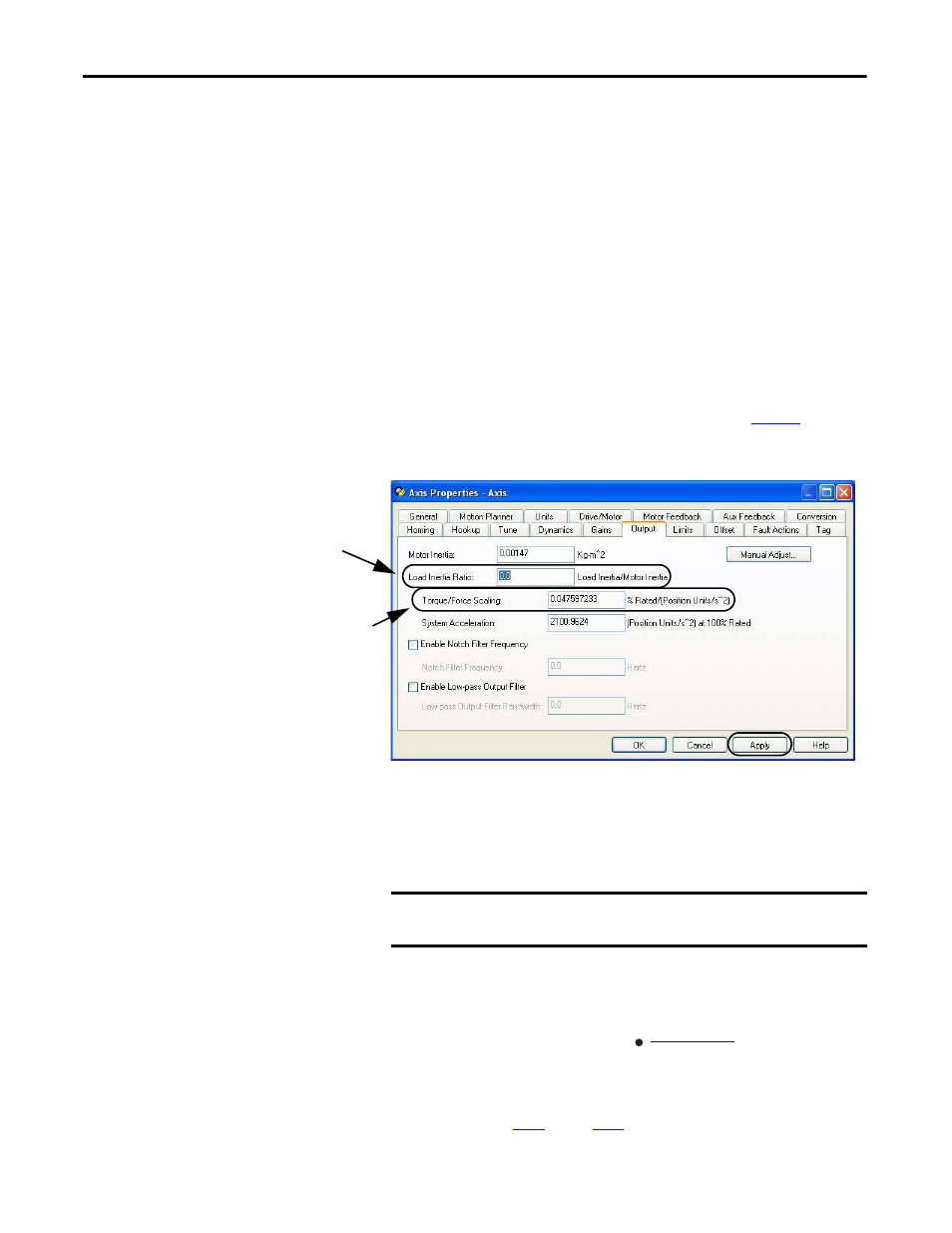
5. Click the Output tab.
The TorqueScaling and LoadInertiaRatio values are populated after an
autotune. If an autotune is not possible, model the system in Motion
Analyzer software and enter that value for the LoadInertiaRatio. The
default value for the LoadInertiaRatio is 0.0, however for this example, a
ratio of 10.20:1 is used (load inertia = 0.015 Kg-m^2).
To calculate the maximum acceleration and deceleration from Torque
max
,
use this equation.
TIP
For more information on system configuration with your Logix5000
controller and the Logix Designer application, refer to
Default LoadInertiaRatio Value
Default TorqueScaling Value
IMPORTANT
To obtain more accurate results, performing Autotune in the Logix
Designer application is recommended.
Torque
max
100
Accel
max
=
TorqueScaling
TIP
If autotune cannot be performed, enter the data for the
LoadInertiaRatio, DriveResolution, and ConversionConstant as shown
in
step 5
through
step 9
.