Wiring the safe torque-off (sto) connector – Rockwell Automation 2094-xMxx-S Kinetix 6000 Multi-axis Servo Drives User Manual User Manual
Page 102
102
Rockwell Automation Publication 2094-UM001H-EN-P - June 2013
Chapter 5
Connecting the Kinetix 6000 Drive System
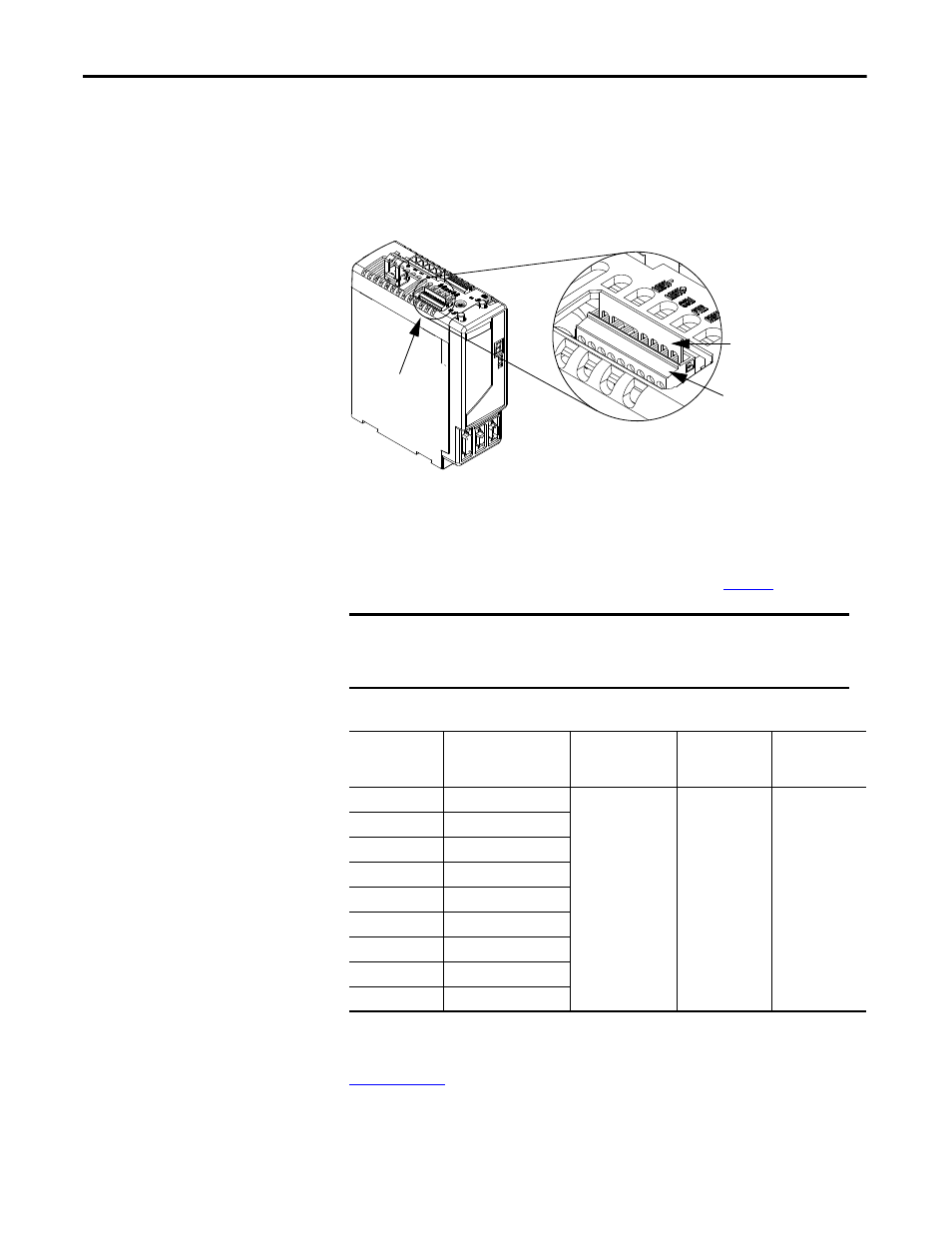
Wiring the Safe Torque-off (STO) Connector
This example applies to any IAM or AM module equipped with the torque-off
(STO) connector.
Figure 52 - IAM/AM Module (STO connector)
Each IAM and AM module ships with the (9-pin) wiring-plug header and
motion-allowed jumper installed in the safe torque-off connector. With the
motion-allowed jumper installed, the safe torque-off feature is not used.
Pinouts for the torque-off (STO) connector are shown on
Table 67 - Safe Torque-off (STO) Connector
To wire the safe torque-off connector in single axis or multi-axis configurations,
refer to the Kinetix Safe Torque-off Feature Safety Reference Manual, publication
.
1 2
3 4
5 6
7 8
9
1
Motion-allowed Jumper
Wiring Plug Header
Kinetix 6000
IAM/AM Module
(AM module is shown)
Safe Torque-off
(STO) Connector
IMPORTANT
Pins STO-8 and STO-9 (24V+) are used by only the motion-allowed jumper.
When wiring to the wiring-plug header, the 24V supply must come from an
external source.
STO Pin
Signal
Recommended
Wire Size
mm
2
(AWG)
Strip Length
mm (in.)
Torque Value
N•m (lb•in)
1
FDBK2+
0.75 (18)
(stranded wire with
ferrule)
1.5 (16)
(solid wire)
7.0 (0.275)
0.235 (2.0)
2
FDBK2-
3
FDBK1+
4
FDBK1-
5
SAFETY ENABLE2+
6
SAFETY ENABLE-
7
SAFETY ENABLE1+
8
24V +
9
24V_COM