Rockwell Automation 2094-xMxx-S Kinetix 6000 Multi-axis Servo Drives User Manual User Manual
Page 63
Rockwell Automation Publication 2094-UM001H-EN-P - June 2013
63
Connector Data and Feature Descriptions
Chapter 4
Kinetix 6000 drives do not support Heidenhain EnDat high-resolution
feedback; however, you can use the 2090-K6CK-KENDAT feedback module to
convert Heidenhain EnDat high-resolution feedback to Stegmann Hiperface.
Pin numbers in the table below refer to pins in the feedback module.
Table 29 - Heidenhain EnDat
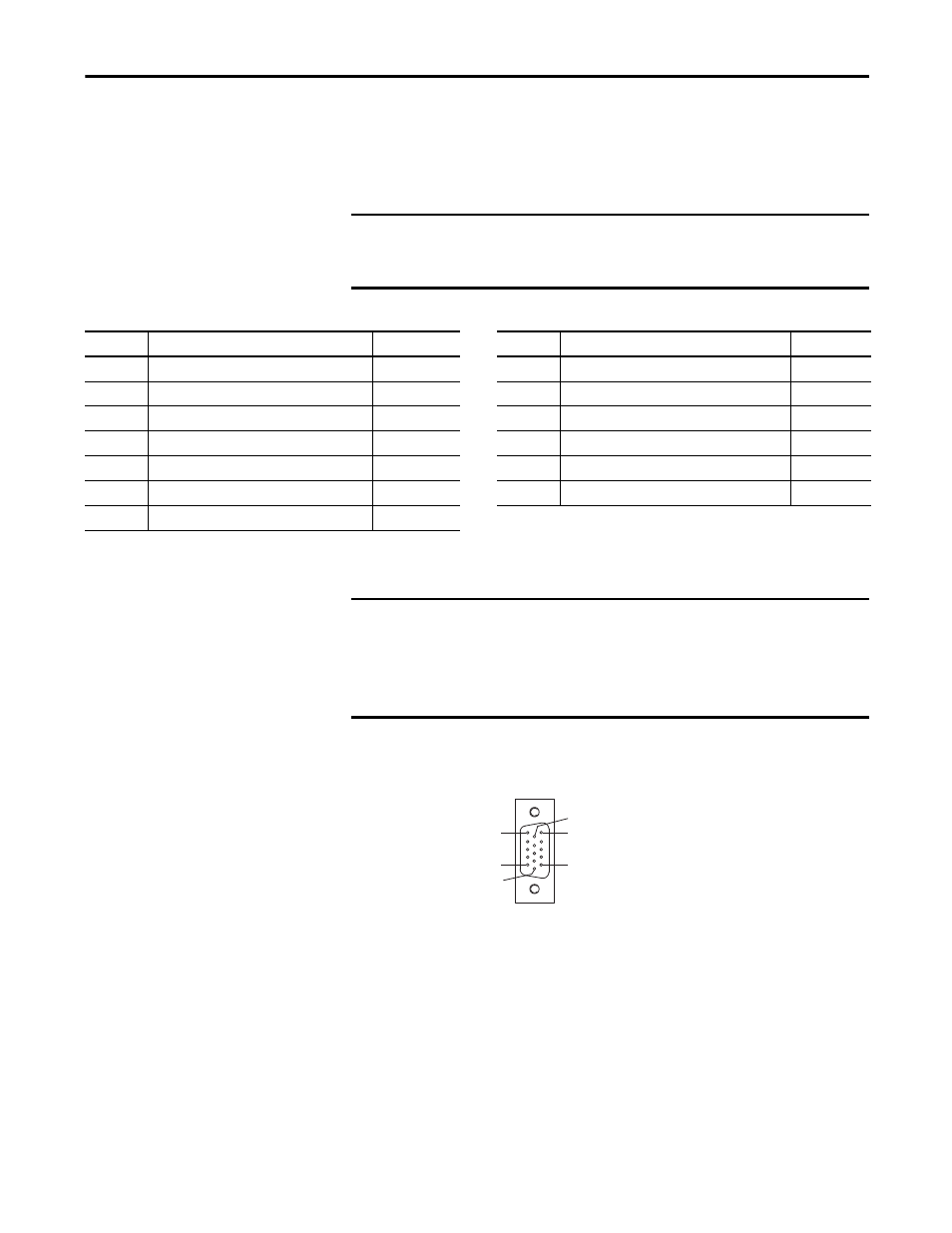
Figure 27 - Pin Orientation for 15-pin Motor Feedback (MF) Connector
IMPORTANT
Only 2094-xCxx-Mxx-S and 2094-xMxx-S drives with firmware revision 1.116 or
later support the use of 2090-K6CK-KENDAT feedback modules for Heidenhain
EnDat feedback.
Pin
Description
Signal
Pin
Description
Signal
1
Sine differential input+
SIN+
8
Serial data clock signal -
CLK-
2
Sine differential input-
SIN-
9
Serial data differential signal+
DATA+
3
Cosine differential input+
COS+
10
Serial data differential signal -
DATA-
4
Cosine differential input-
COS-
11
Motor thermal switch+
(1)
TS+
5
Encoder power (+5V)
EPWR_5V
12
Motor thermal switch-
(2)
TS-
6
Common
ECOM
13
Reserved
–
7
Serial data clock signal +
CLK+
(1) Not applicable unless motor has integrated thermal protection.
(2) When used with Allen-Bradley motors and Bulletin 2090 cables, pin 12 is reserved.
IMPORTANT
Combined motor-power cable length for all axes on the same DC bus must not
exceed 240 m (787 ft) with 460V systems or 160 m (525 ft) with 230V systems.
Drive-to-motor power cables must not exceed 90 m (295.5 ft).
System performance was tested at these cable length specifications. These
limitations also apply when meeting CE requirements.
Pin 11
Pin 6
Pin 15
Pin 1
Pin 10
Pin 5
15-pin IAM/AM
Motor Feedback Connector