Rockwell Automation 2094-xMxx-S Kinetix 6000 Multi-axis Servo Drives User Manual User Manual
Page 167
Rockwell Automation Publication 2094-UM001H-EN-P - June 2013
167
Troubleshooting the Kinetix 6000 Drive System
Chapter 7
E34
GroundShortFault
(Ground Fault)
Excessive ground current in the
converter was detected.
Wiring error.
• Check motor power wiring.
• Check input power wiring.
Motor internal ground short.
Replace motor.
Internal malfunction.
Disconnect motor power cable from drive and
enable drive with current limit set to 0. If fault
clears, then a wiring error or motor internal
anomaly exists. If fault remains, call your sales
representative.
Grounded control power terminal
(applies to 230V systems only)
• Remove ground from control power input.
• Source control power from three-phase input
power (refer to page 190).
• Add isolation transformer for control power.
E35
DriveUndervoltage Fault
(Pre-charge Fault)
Converter pre-charge cycle
failed.
Low AC input voltage.
Check input AC voltage on all phases.
Internal malfunction.
Call your sales representative.
E36
DriveOvertemp Fault
(System Overtemperature)
Converter thermal switch
tripped.
Excessive heat exists in the power circuitry.
• Reduce acceleration rates.
• Reduce duty cycle (ON/OFF) of commanded
motion.
• Increase time permitted for motion.
• Use larger IAM converter module.
• Check for clogged vents or defective fan.
• Make sure cooling is not restricted by insufficient
space around the unit.
E37
PowerPhaseLoss Fault
(Phase Loss Flt)
• One or more phases of the input AC power is missing.
• Axis was enabled when main (three-phase) power was removed.
• common-bus follower axis was enabled when DC bus power was removed.
• Check input AC voltage on all phases.
• Disable axis before removing power.
E38
SercosFault
(Sercos Ring Flt)
The sercos ring is not active
after being active and
operational.
Cable disconnected.
Check that fiber-optic cable is present and
connected properly.
E39
DriveHardFault
(Self Sense Flt)
Self-sensing Commutation
Start-up Error
Motion required for self-sensing start-up
commutation was obstructed.
• Verify that there are no impediments to motion
at startup, such as hard limits.
• Increase self-sensing current if high friction or
load conditions exist.
• Check motor or encoder wiring by using wiring
diagnostics.
E43
DriveEnableInput Fault
(Drive Enable Flt)
Missing Drive Enable Input
Signal
• An attempt was made to enable the axis
through software while the Drive Enable
hardware input was inactive.
• The Drive Enable input transitioned from
active to inactive while the axis was enabled.
• Disable the Drive Enable Input fault.
• Verify that Drive Enable hardware input is active
whenever the drive is enabled through software.
E49
DriveHardFault
(Safe-off HW Flt)
Safe torque-off function
mismatch. Drive does not
allow motion.
• Loose wiring at STO connector.
• Cable/header not seated properly in STO
connector.
• Safe torque-off circuit missing +24V DC.
• Verify wire terminations, cable/header
connections, and +24V.
• Reset error and run proof test.
• If error persists, return the drive to Rockwell
Automation.
E50
SercosFault
(Sercos Same ADDR)
Duplicate node address detected on sercos ring.
Verify that each sercos drive is assigned a unique
node address.
E54
DriveHardFault
(Ifbk HW Fault)
Current feedback hardware fault detected.
Replace the module
E60
DriveHardFault
(Unknown Axis)
Illegal ID bits detected
Replace the module
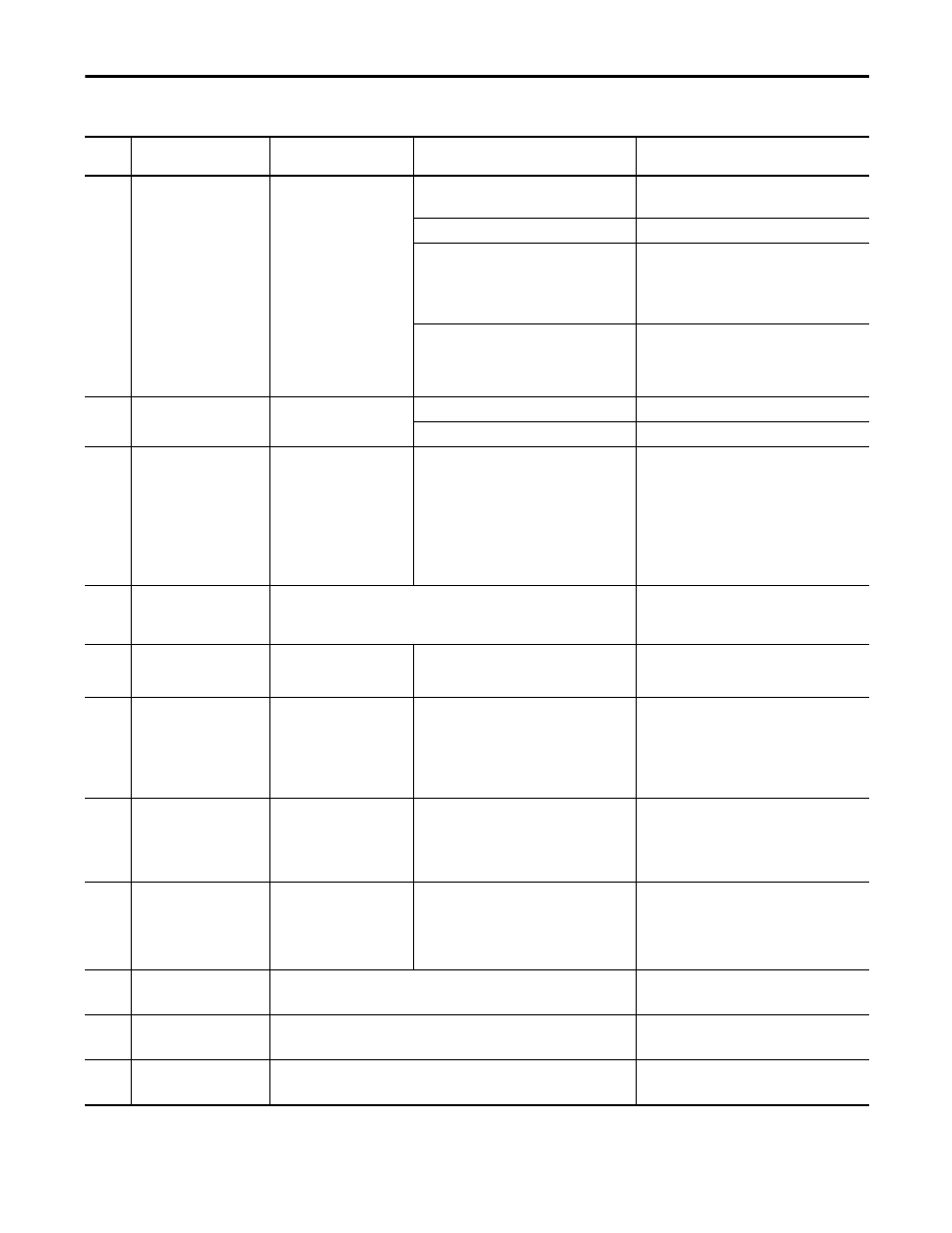
Table 99 - Seven-segment Status Indicator Error Codes (continued)
Error
Code
Fault Message - Logix
Designer (HIM)
Anomaly or Symptom
Potential Cause
Possible Resolution