Rockwell Automation 2094-xMxx-S Kinetix 6000 Multi-axis Servo Drives User Manual User Manual
Page 240
240
Rockwell Automation Publication 2094-UM001H-EN-P - June 2013
Appendix D
Configure the Load Observer Feature
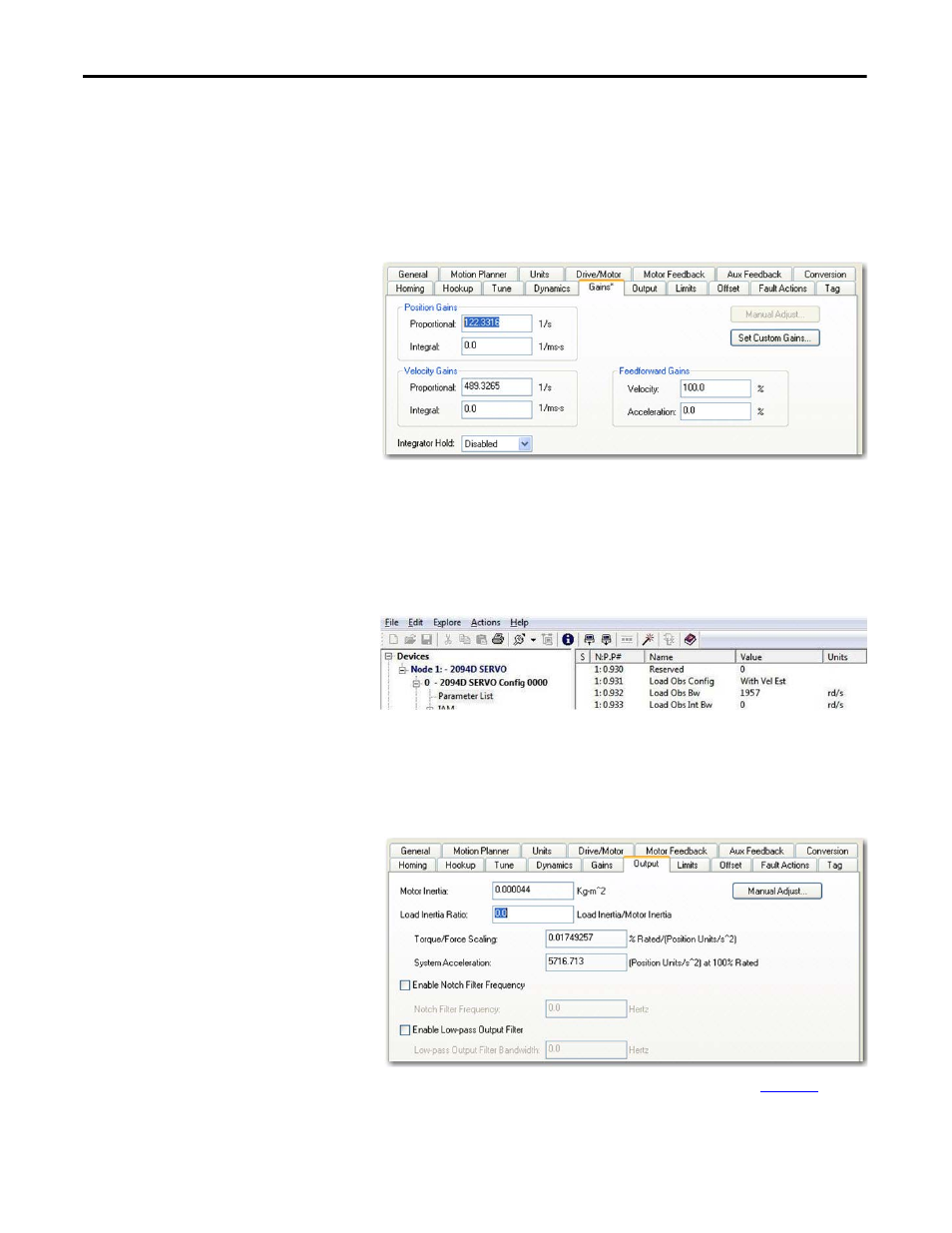
5. Configure these settings and values on the Gains tab.
a. Position Proportional Gain = Kpp
b. Velocity Proportional Gain = Kvp
c. Velocity Feedforward Gain = 100%
d. Integrator Hold = Disabled
6. Configure these IDN parameter values.
a. IDN P-431 = 2 (load observer with velocity estimate)
b. IDN P-432 = Kop
c. IDN P-433 = 0
d. IDN P-065 = 1
7. Click the Output tab in the Axis Properties dialog box and verify these
settings.
a. Load Inertia Ratio = 0
b. Enable Low-pass Output Filter = Unchecked
8. Refer to Compensate for High Frequency Resonances on
, to
tune-out resonant frequencies.
This manual is related to the following products: