Rigid mechanical loads, Compliant mechanical loads, Rigid mechanical loads o – Rockwell Automation 2094-xMxx-S Kinetix 6000 Multi-axis Servo Drives User Manual User Manual
Page 242: For r, To compliant mechanical loads on, For com
242
Rockwell Automation Publication 2094-UM001H-EN-P - June 2013
Appendix D
Configure the Load Observer Feature
Rigid Mechanical Loads
Follow these steps if the load is rigid or the load observer feature is being added to
a previously working set of gains with a Load Inertia Ratio > 0.
1. Calculate the Load Observer Bandwidth.
Load Observer Bandwidth: Kop = Velocity Proportional Gain
2. If the Low-pass Output Filter is enabled, verify that the Low-pass Output
Filter Bandwidth is
≥ the Velocity Proportional Gain x 2/(2pi).
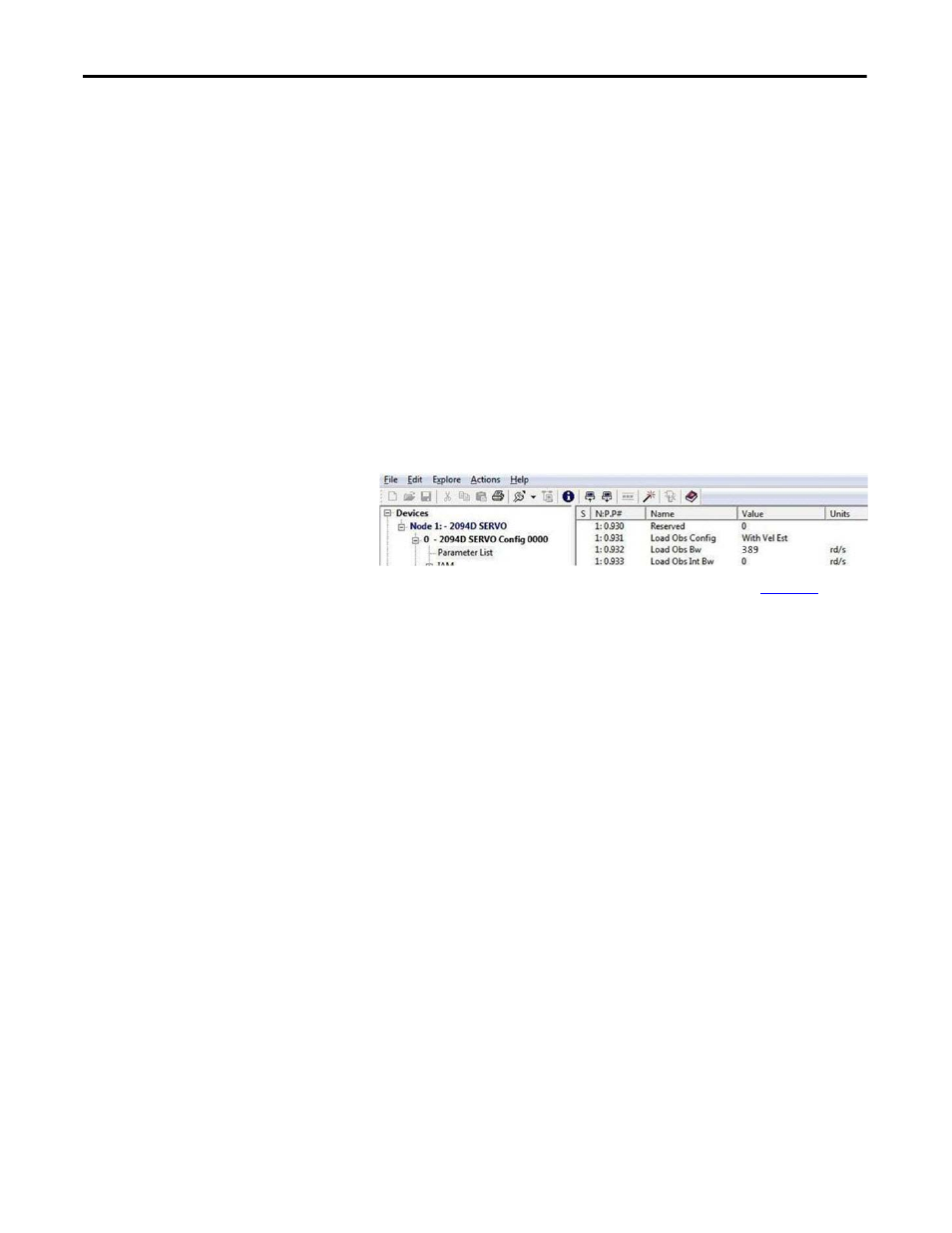
3. Configure these IDN parameter values.
a. IDN P-431 = 2 (Load Observer with Velocity Estimate)
b. IDN P-432 = Kop
c. IDN P-433 = 0
d. IDN P-065 = 1
4. Refer to Compensate for High Frequency Resonances on
, to
tune-out resonant frequencies.
Compliant Mechanical Loads
Follow these steps if the load is compliant.
1. Make the following calculations:
a. Position Loop Bandwidth:
Kpp = Position Proportional Gain/(Load Inertia Ratio + 1)
b. Position Integral Bandwidth:
Kpi = Position Integral Gain/(Load Inertia Ratio + 1)
2
c. Velocity Loop Bandwidth:
Kvp = Velocity Proportional Gain/(Load Inertia Ratio + 1)
d. Velocity Integral Bandwidth:
Kvi = Velocity Integral Gain/(Load Inertia Ratio + 1)
2
e. Load Observer Bandwidth: Kop = Kvp