Set the additional bus capacitance parameter, Remove sercos communication – Rockwell Automation 2094-xMxx-S Kinetix 6000 Multi-axis Servo Drives User Manual User Manual
Page 229
Rockwell Automation Publication 2094-UM001H-EN-P - June 2013
229
DC Common Bus Applications
Appendix C
Set the Additional Bus
Capacitance Parameter
In this section you set the Add Bus Cap parameter by using DriveExplorer
software.
The following hardware and software tools are required to provide the necessary
communication link between your personal computer and the Kinetix 6000 drive
system running DriveExplorer software.
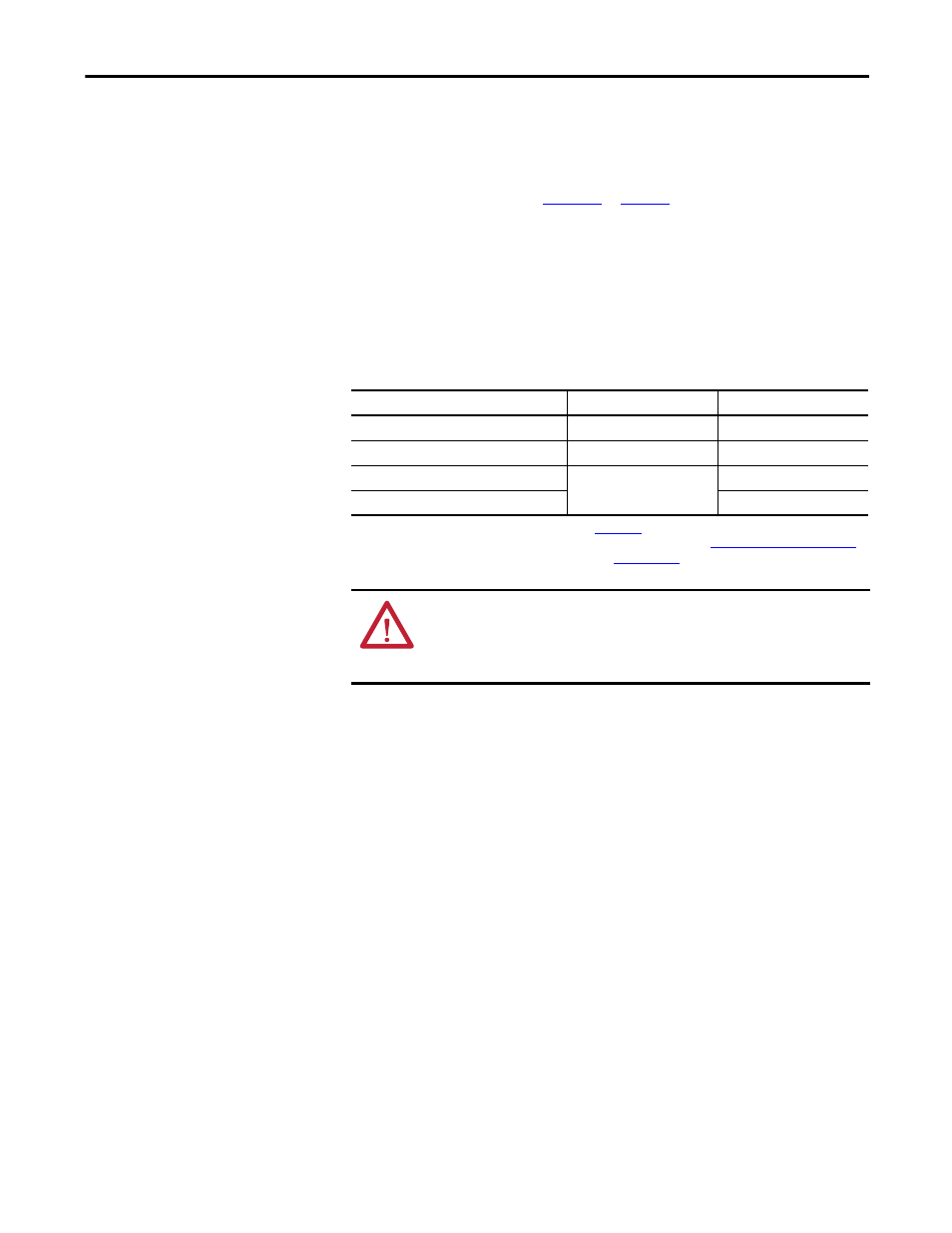
Table 121 - Kinetix 6000 System Requirements
Remove Sercos Communication
Follow these steps to remove (break) sercos communication.
1. Remove three-phase and control power from the Kinetix 6000 drive
system.
2. Remove one of the sercos fiber-optic cables.
Fiber-optic cable connections (Tx and Rx) are on the top of each IAM and
AM module.
3. Re-apply three-phase and control power.
TIP
You can also set the Add Bus Cap parameter by changing IDN parameter
values. Refer to
for more information.
TIP
You can use this procedure to change other parameters too, the Analog
Output parameters, for example.
Description
Cat. No.
Version
DriveExplorer software
(1) (2)
(1) Refer to DriveExplorer Getting Results Manual, publication
, for instructions.
(2) Additional information regarding these communication and software tools is available at
9306-4EXP02ENE
2.01 or later
Serial to SCANport adapter
(2) (3)
(3) Refer to 1203-SSS (series B) FRN 3.xxx User Manual, publica
uctions.
1203-SSS (Series B)
3.004 or later
Studio 5000 Logix Designer application
9324-RLD300xxE
21.0 or later
RSLogix 5000
software
15.0 or later
ATTENTION: To avoid personal injury or equipment damage, at least one end of
a sercos fiber-optic cable must be disconnected from the drive. This makes sure
that motion does not occur while changes are being made to the Add Bus Cap
parameter.