Rockwell Automation 2094-xMxx-S Kinetix 6000 Multi-axis Servo Drives User Manual User Manual
Page 238
238
Rockwell Automation Publication 2094-UM001H-EN-P - June 2013
Appendix D
Configure the Load Observer Feature
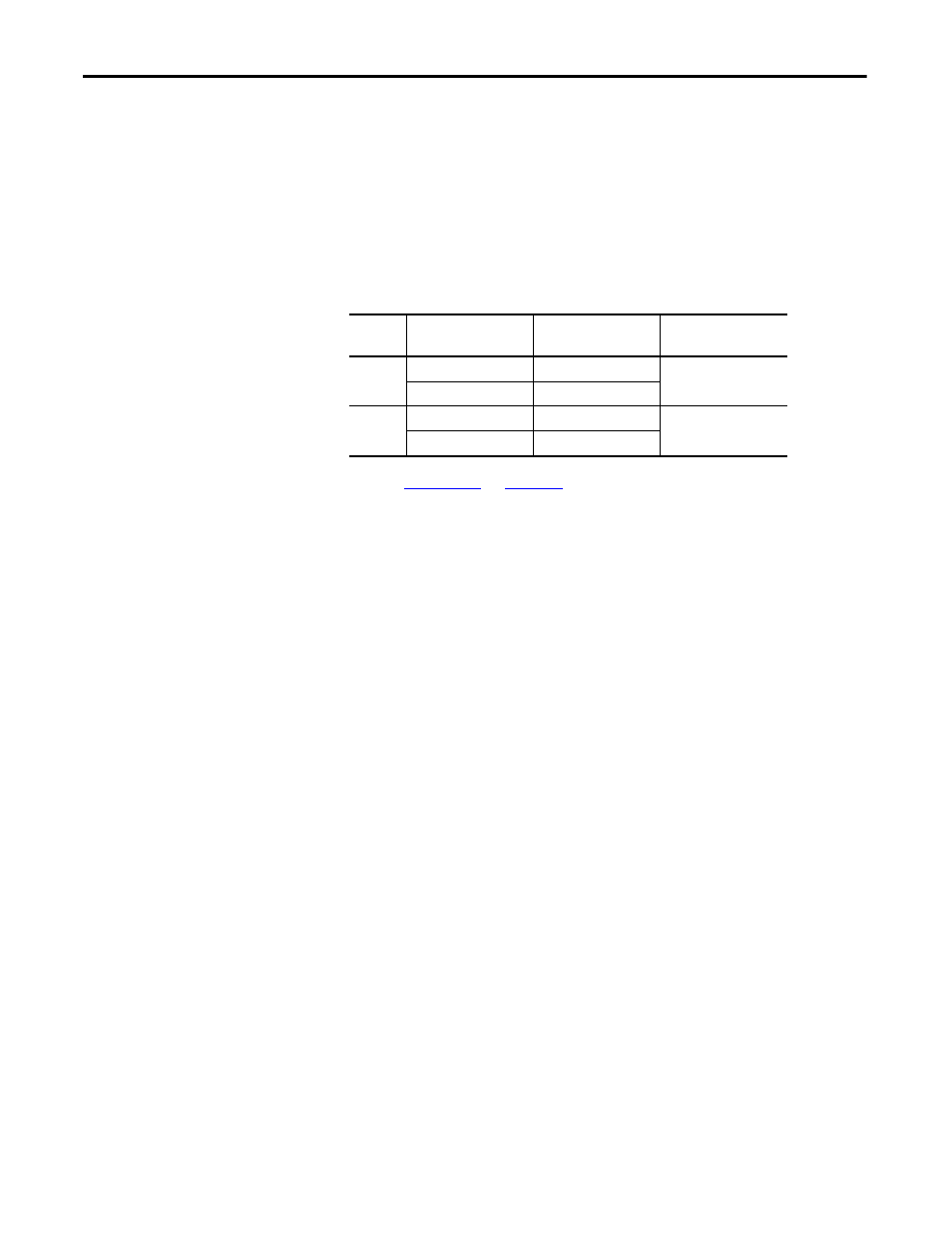
When load observer and the torque low-pass filter are both enabled, and the low-
pass filter bandwidth is less than 5 times the load observer bandwidth, their
interaction can interfere with each other, causing instability. The low-pass filter is
always limited to a bandwidth under 389 Hz in drive firmware prior to revision
1.116. As a result, an IDN parameter was added in drive firmware revision 1.116
to override the torque low-pass filter bandwidth limiting. The filter is also
bypassed if the override IDN is set to one and the torque low-pass filter
bandwidth is set to zero.
Table 125 - Torque Low-pass Filter Bandwidth
for more information on changing IDN
parameter values with read/write messages in the Logix Designer application.
IDN
P:0:065
Bandwidth in the Logix
Designer Application
Actual Bandwidth in
Drive
Drive Firmware Notes
0
= 0
389 Hz
Operation before revision
1.116
> 0
Limited to
≤ 389 Hz
1
= 0
Filter bypassed
Operation with revision
1.116 or later
> 0
Limited to
≤ 10,430 Hz