Power and relay specifications, Motor/resistive brake relay – Rockwell Automation 2094-xMxx-S Kinetix 6000 Multi-axis Servo Drives User Manual User Manual
Page 71
Rockwell Automation Publication 2094-UM001H-EN-P - June 2013
71
Connector Data and Feature Descriptions
Chapter 4
Power and Relay
Specifications
This section provides a description of the Kinetix 6000 brake relay (BC), input
power (IPD), motor power (MP), and control power (CPD) connectors.
Motor/Resistive Brake Relay
Series C brake circuits use solid-state relays. Series A and B drive modules used
mechanical relays. The solid-state brake driver circuit provides the following:
• Brake thermal overload protection
• Brake current overload protection
• Brake short circuit protection
Two connections are required for the (customer-supplied) motor/resistive brake
input power (BC-3 and BC-4) and two connections each for the motor and
resistive brake output, as shown in
Figure 33
. Wiring is consistent with all series
releases. Connections are rated for +24V and current as shown in
.
An active signal releases the motor brake (BC-5 and BC-6). The brake signal
turn-on and turn-off delays are specified by the brake active delay and brake
inactive delay (configurable in the Logix Designer application). Refer to the Axis
Module/Rotary Motor Wiring Examples beginning on
and the
Controlling a Brake Example on
for wiring examples.
The resistive brake relay (BC-1 and BC-2) controls the resistive brake module
(RBM) contactor. The RBM module is wired between the drive and motor by
using an internal contactor to switch the motor between the drive and a resistive
load. The RBM module contact delay is the time it takes to fully close the
contactor across the motor power input lines, and must be configured in the
software. Refer to RBM Module Interconnect Diagrams beginning on
for wiring examples.
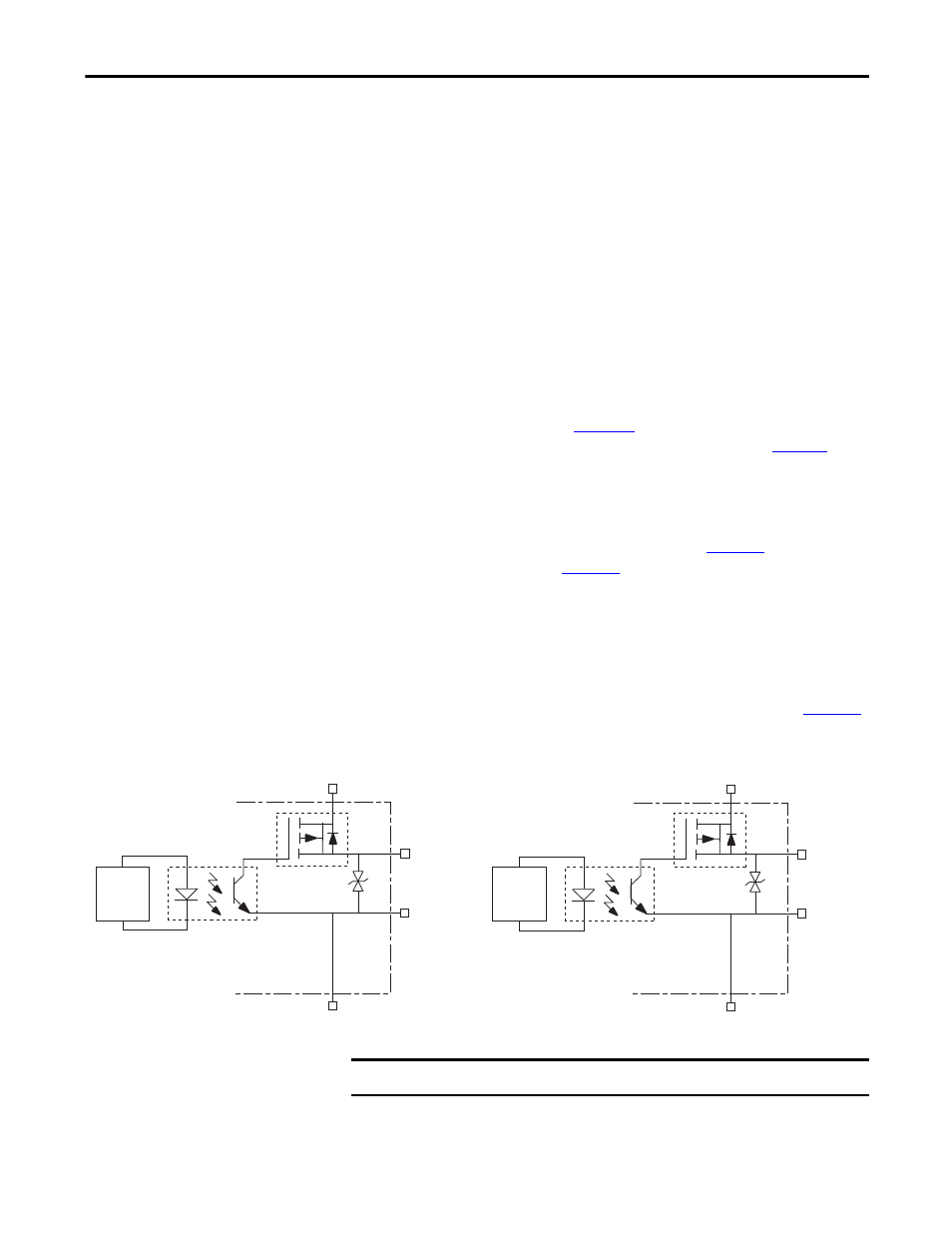
Figure 33 - Brake Relay Circuit (series C)
(1) Noise suppression device.
24V PWR (BC-3)
FQB22P10
MBRK+ (BC-5)
MBRK– (BC-6)
(1)
DBRK+ (BC-1)
DBRK– (BC-2)
24V COM (BC-4)
24V PWR (BC-3)
FQB22P10
(1)
24V COM (BC-4)
Resistive Brake Module Circuitry
Kinetix 6000
IAM/AM Module
Motor Brake Circuitry
Kinetix 6000
IAM/AM Module
Control
Board
Control
Board
IMPORTANT
Motor parking-brake switching frequency must not exceed 10 cycles/min.