Rockwell Automation 2094-xMxx-S Kinetix 6000 Multi-axis Servo Drives User Manual User Manual
Page 237
Rockwell Automation Publication 2094-UM001H-EN-P - June 2013
237
Configure the Load Observer Feature
Appendix D
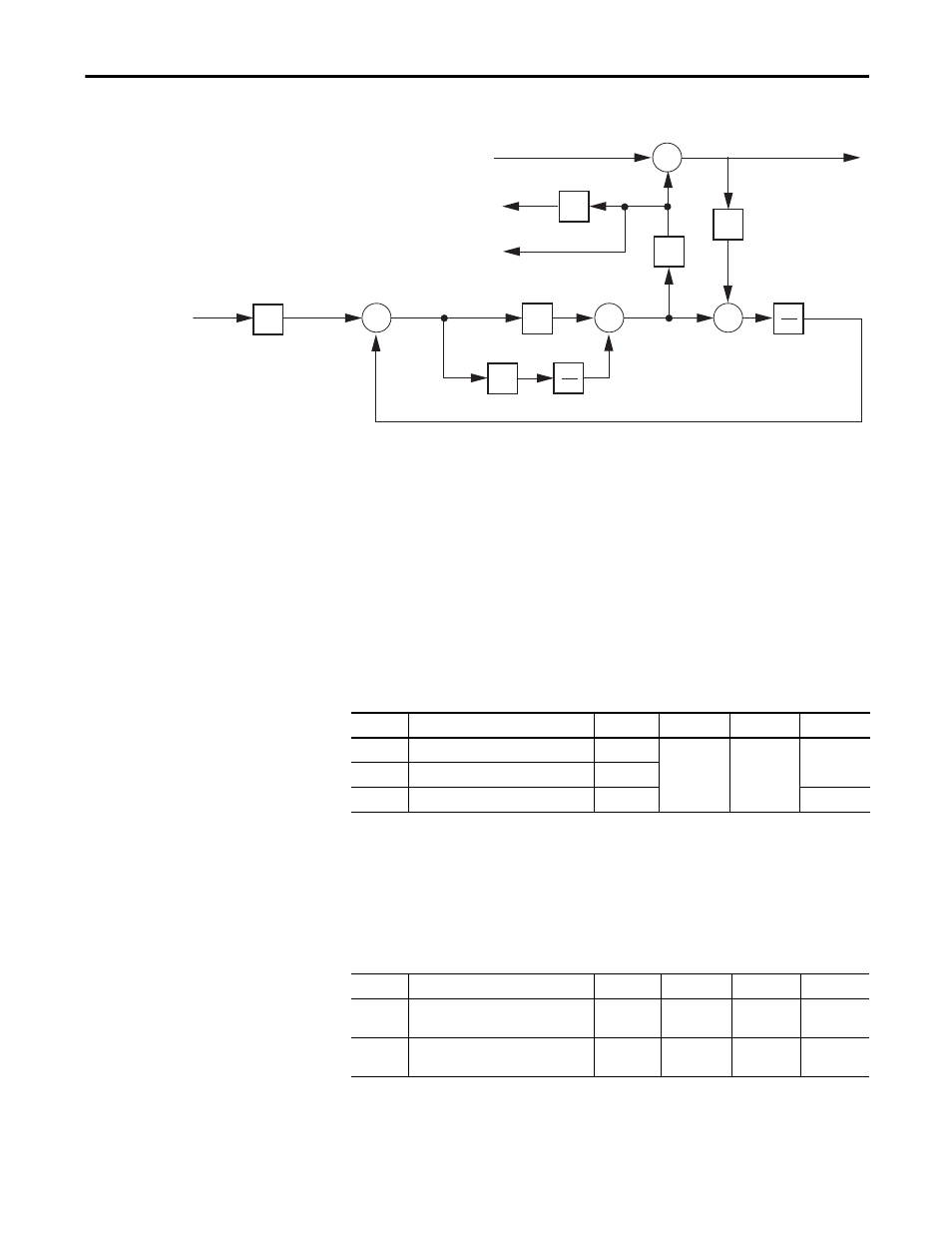
Figure 117 - Load Observer Gains
Load observer gains that require user interaction are Load Observer Bandwidth
(Kop) and Load Observer Integral Bandwidth (Koi). They are set by IDN P-432
and IDN P-433, respectively. Guidelines for setting these gains are provided in
the following sections. In general, Kop acts like a velocity integrator without
windup and Koi acts a like a position integrator without windup.
Load observer gains that do not require user interaction are Load Observer
Feedback Gain (Kof ) and the Load Observer Input Gain (Kou). They are
automatically set internally based on the Load Observer Configuration.
However, when in Acceleration Feedback mode, Kof can also be set manually by
IDN P-434 with typical values between zero and one.
Table 123 - Load Observer Gain Parameters
The Acceleration Estimate and Torque Estimate signals are read by using
IDN-435 and P-436, respectively. Definitions for these IDN parameters are
given in the following table.
Table 124 - Load Observer Output Signals
–
–
Kof
Kjm
1
s
Kou
1
s
Koi
FIR
Δ
Kop
Torque Estimate
Acceleration Estimate
Acceleration Reference
Acceleration Command
Feedback
Position
Feedback
Velocity
Load Observer
Plant
Velocity
Estimate
IDN
Name
Units
Format
Value, min
Value, max
P:0:432
Load Observer Bandwidth (Kop)
Rad/s
16 bit
unsigned int
0
12,500
(1)
65,535
(2)
(1) This value applies to drive firmware revision 1.124.
(2) This value applies to drive firmware revisions later than 1.124.
P:0:433
Load Observer Integral Bandwidth (Koi)
Rad/s
P:0:434
Load Observer Feedback Gain (Kof)
–
200
IDN
Name
Units
Format
Value, min
Value, max
P:0:435
Load Observer Acceleration Estimate
Acceleration
32bit
signed int
-2
31
2
31
-1
P:0:436
Load Observer Torque Estimate
Torque
16 bit
signed int
-2
15
2
15
-1