Rockwell Automation 2094-xMxx-S Kinetix 6000 Multi-axis Servo Drives User Manual User Manual
Page 166
166
Rockwell Automation Publication 2094-UM001H-EN-P - June 2013
Chapter 7
Troubleshooting the Kinetix 6000 Drive System
E09
BusUndervoltage Fault
(Bus Undervoltage)
With three-phase power
present, the DC bus voltage is
below limits.
• DC bus voltage for 460V system is below 275V
• DC bus voltage for 230V system is below 137V
• Verify voltage level of the incoming AC power.
• Check AC power source for glitches or line drop.
• Install an uninterruptible power supply (UPS) on
your AC input.
DC bus voltage fell below the
undervoltage limit while an
axis on the follower power rail
was enabled.
Disable follower axis before removing power.
E10
DriveOvervoltage Fault
(Bus Overvoltage)
The DC bus voltage is above
limits.
Excessive regeneration of power.
When the motor is driven by an external
mechanical power source, it can regenerate too
much peak energy through the drive power
supply. The system faults to save itself from an
overload.
• Change the deceleration or motion profile.
• Use a larger system (motor and Kinetix 6000
drive).
• Install shunt module.
• DC bus voltage for 460V system is over 820V
• DC bus voltage for 230V system is over 410V
Verify input is within specifications.
E11
MotFeedbackFault
(Illegal Hall State)
State of Hall feedback inputs is
incorrect.
Improper connections.
• Verify the Hall wiring at the MF connector on the
IAM/AM module.
• Verify 5V power supply to the encoder.
E16
Softovertravel Fault
(+/- Software Overtravel)
Axis position exceeded maximum software setting.
• Verify motion profile.
• Verify overtravel settings are appropriate.
E18
OverSpeedFault
(Overspeed Fault)
Motor speed has exceeded 150% of maximum rated speed. The 100% trip point is
dictated by the lesser of the user velocity limits or the motor rated base speed.
• Check cables for noise.
• Check tuning.
E19
PositionErrorFault
(Follow Error)
Position error limit was exceeded.
• Increase the feed forward gain.
• Increase following error limit or time.
• Check position loop tuning.
• Verify sizing of system.
• Verify mechanical integrity of system within
specification limits.
E20
MotFeedbackFault
(Mtr Fdbk AQB)
Motor Encoder State Error
The motor encoder encountered an illegal
transition.
• Use shielded cables with twisted pair wires.
• Route the feedback away from potential noise
sources.
• Check the system grounds.
• Replace the motor/encoder.
E21
AuxFeedbackFault
(Aux Feedback Comm)
Communication was not established with an intelligent encoder.
Verify auxiliary encoder wiring.
E30
MotFeedbackFault
(Motor Feedback Comm)
Communication was not established with an intelligent encoder.
• Verify motor selection.
• Verify the motor supports automatic
identification.
• Verify motor encoder wiring.
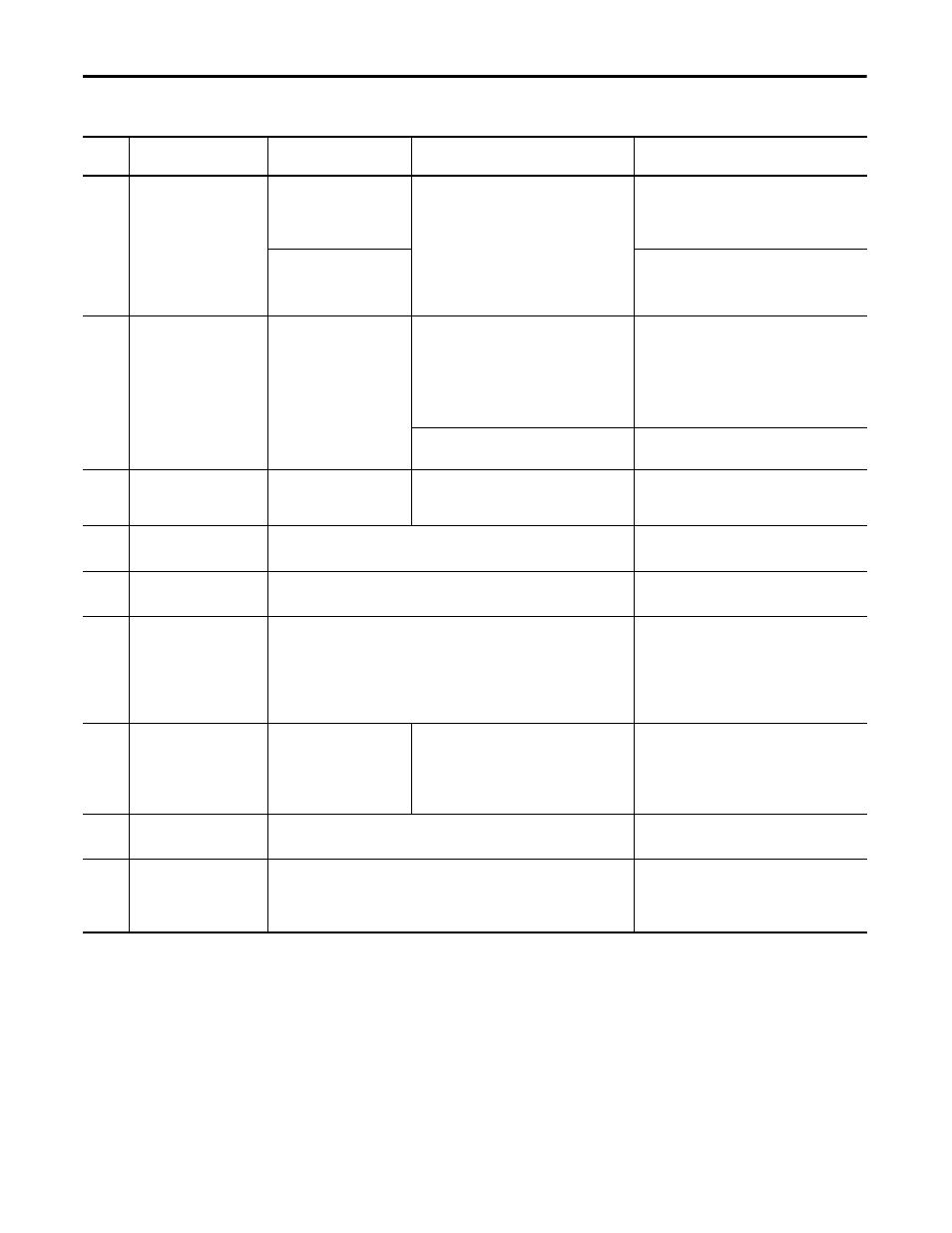
Table 99 - Seven-segment Status Indicator Error Codes (continued)
Error
Code
Fault Message - Logix
Designer (HIM)
Anomaly or Symptom
Potential Cause
Possible Resolution