Out-of-box gain settings – Rockwell Automation 2094-xMxx-S Kinetix 6000 Multi-axis Servo Drives User Manual User Manual
Page 239
Rockwell Automation Publication 2094-UM001H-EN-P - June 2013
239
Configure the Load Observer Feature
Appendix D
Out-of-Box Gain Settings
This method of setting controller gains works for unknown loads or when an
auto-tune is not performed. It produces a relatively high level of performance in
90% of motion applications. Most of the time, there is no need to perform an
auto-tune procedure or further optimize gain settings. As a result, it has become
the default out-of-box setting for Kinetix drives using integrated motion on the
EtherNet/IP network.
Follow these steps to configure the drive for high performance right out of the
box.
1. Create a new axis with type AXIS_SERVO_DRIVE.
If you need more information to create a new axis, refer to Configure the
Kinetix 6000 Drive Modules on
.
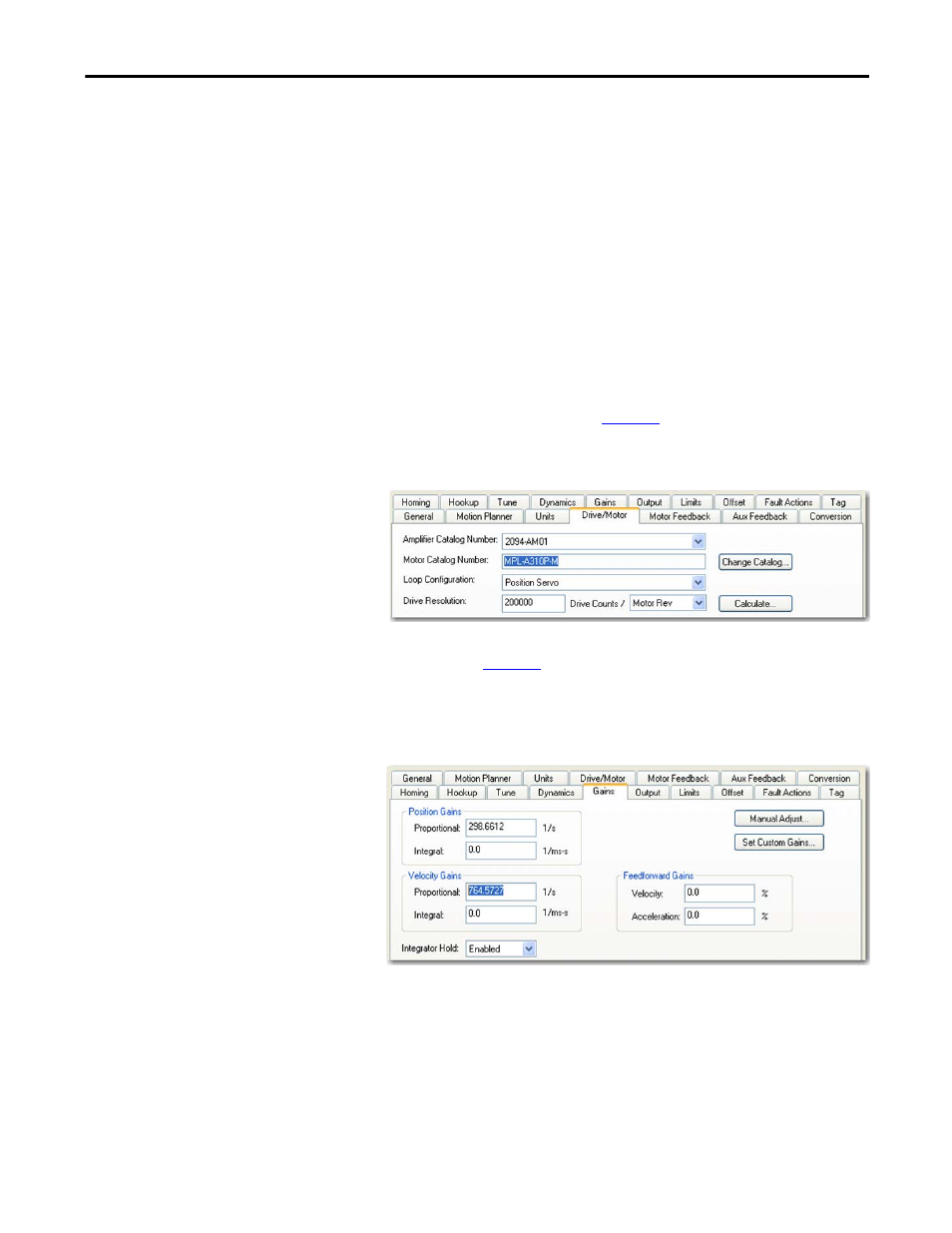
2. Click the Drive/Motor tab in the Axis Properties dialog box and add a
motor.
If you need more information to add a motor, refer to Configure Axis
Properties on
3. Click the Gains tab in the Axis Properties dialog box.
The current Velocity Proportional Gain value is used to recalculate other
gain values.
4. Make the following calculations:
a. Load Observer Bandwidth: Kop = Velocity Proportional Gain x 2.56
b. Velocity Loop Bandwidth: Kvp = Kop/4
c. Position Loop Bandwidth: Kpp = Kvp/4