Motor feedback specifications – Rockwell Automation 2094-xMxx-S Kinetix 6000 Multi-axis Servo Drives User Manual User Manual
Page 78
78
Rockwell Automation Publication 2094-UM001H-EN-P - June 2013
Chapter 4
Connector Data and Feature Descriptions
Motor Feedback Specifications
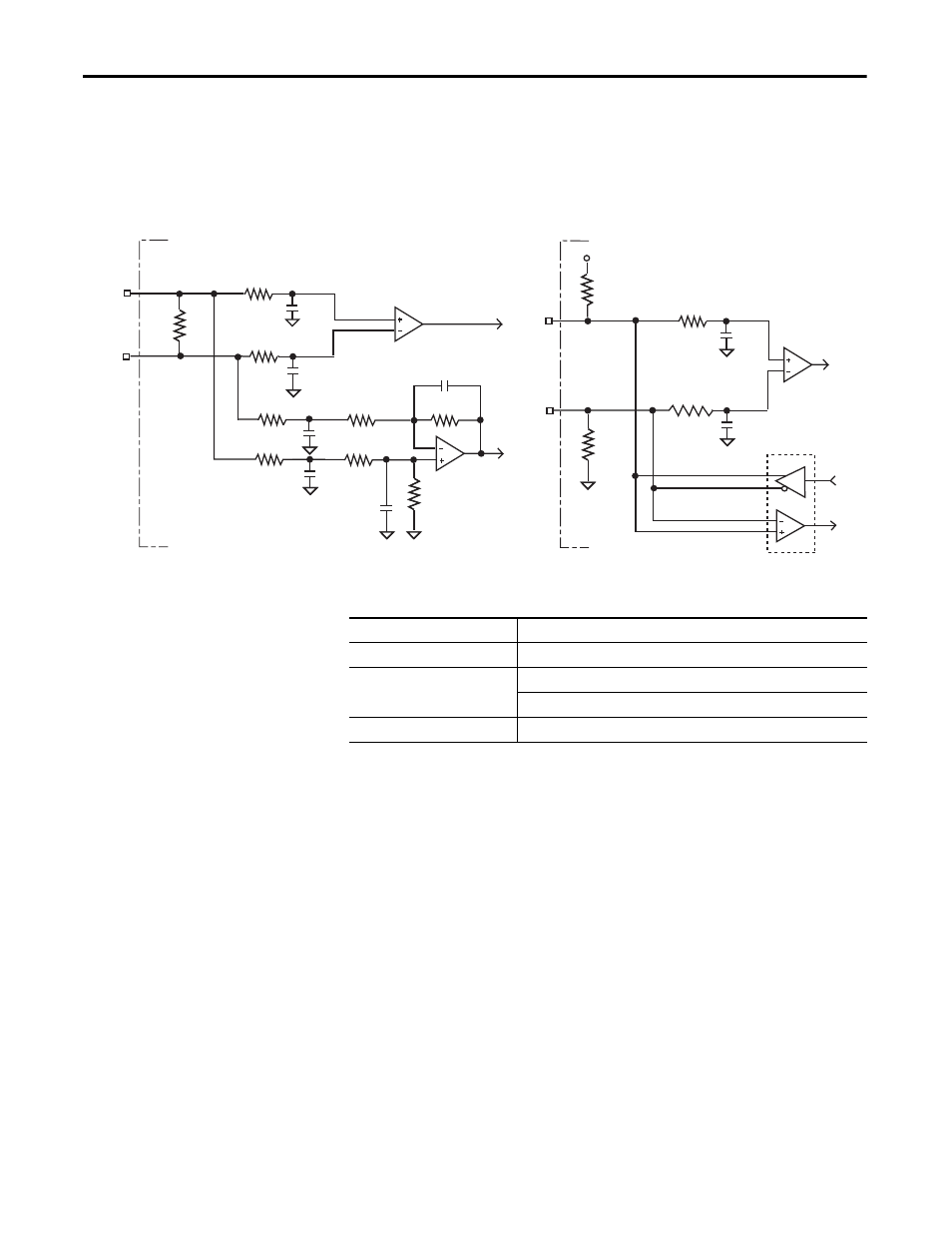
AM, BM, and IM input encoder signals are filtered by using analog and digital
filtering. The inputs also include illegal state change detection.
Figure 38 - AM, BM, and IM Motor Encoder Input Circuits
Table 52 - Motor Encoder Feedback Specifications
10k
Ω
10k
Ω
+5 V
1k
Ω
1k
Ω
+
-
56 pF
56 pF
10k
Ω
1k
Ω
1k
Ω
10k
Ω
1k
Ω
1k
Ω
1k
Ω
1k
Ω
1k
Ω
100 pF
+
-
100 pF
56 pF
56 pF
56 pF
56 pF
Drive
Drive
AM and BM Channel Inputs
IM Channel Input
Attribute
Value
Encoder types
Incremental, A quad B, sine/cosine, intelligent, resolver, and absolute
Maximum input frequency
500 kHz (TTL input) per channel
250 kHz (sine/cosine input)
Commutation feedback
Hall sensor