Rockwell Automation 2094-xMxx-S Kinetix 6000 Multi-axis Servo Drives User Manual User Manual
Page 162
162
Rockwell Automation Publication 2094-UM001H-EN-P - June 2013
Chapter 6
Configure and Start the Kinetix 6000 Drive System
Parameters begin with a variable to identify a specific axis by slot number, as
follows:
• IAM module = 0 for parameters 0…999
• 1st AM module = 1 for parameters 1000…1999
• 2nd AM module = 2 for parameters 2000…2999 and so on
• 7th AM module = 7 for parameter 7000…7999
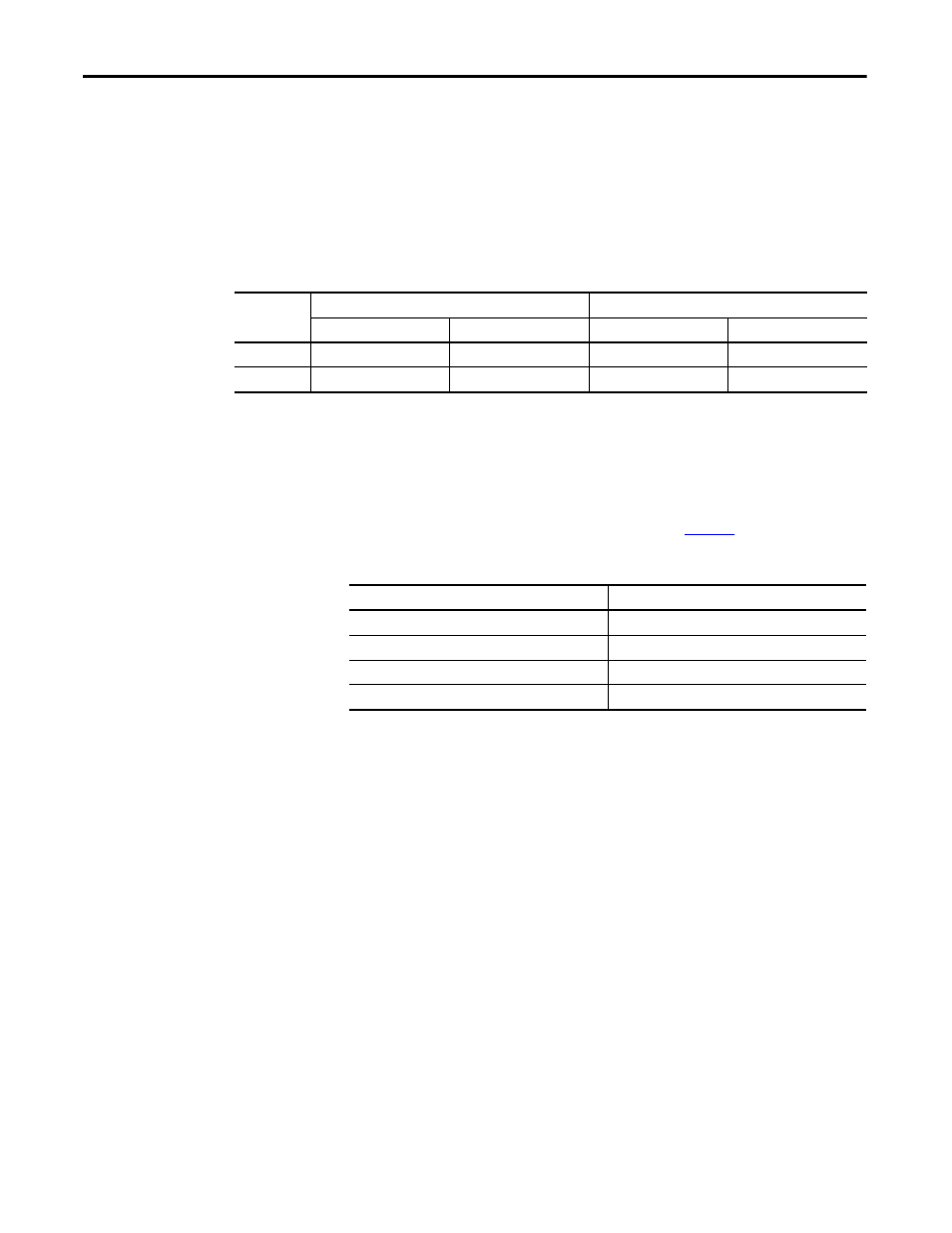
Table 97 - Monitor System Variables
The value entered in Scale Parameter scales the analog output so that you can get
a full scale reading of the specific parameter for the dynamic range or values you
are testing.
For linear scaling specifications, refer to the table on
Table 98 - Monitor Dynamic System Variables
Analog
Output
Controlling Parameter
Scale Parameter
Parameter Number
(1)
Default Value
(1)
Parameter Number
(1)
Default Value
1
x681
xx40
x682
0.0060
2
x683
xx84
x684
0.1000
(1) x = slot number
Attribute
Parameter Number
(1)
(1) x = slot number.
Velocity feedback
xx40
Velocity commanded
xx36
Torque feedback
xx84
Torque commanded
xx80