Rockwell Automation 2094-xMxx-S Kinetix 6000 Multi-axis Servo Drives User Manual User Manual
Page 256
256
Rockwell Automation Publication 2094-UM001H-EN-P - June 2013
Appendix F
Enhanced Peak Performance
The default values that populate the AXIS_SERVO_DRIVE properties in the
Logix Designer application are calculated for each motor and drive, but assume
150% peak torque in those calculations. For the drive to command more current,
you must enter new values for some of those parameters, including the following:
• TorqueLimitBipolar
• TorqueLimitPositive
• TorqueLimitNegative
• MaximumAcceleration
• MaximumDeceleration
• AccelerationLimitBipolar
• AccelerationLimitPositive
• AccelerationLimitNegative
You can access these parameters offline in the Logix Designer application Axis
Properties tabs or online as sent to the drive in an SSV instruction.
To calculate the new values, you also need to determine these values:
• Drive electrical data (Motion Analyzer solution page, under Drive tab)
• Motor electrical data (Motion Analyzer solution page, under Motor tab)
• TorqueScaling (the Logix Designer application, Axis Properties,
Output tab)
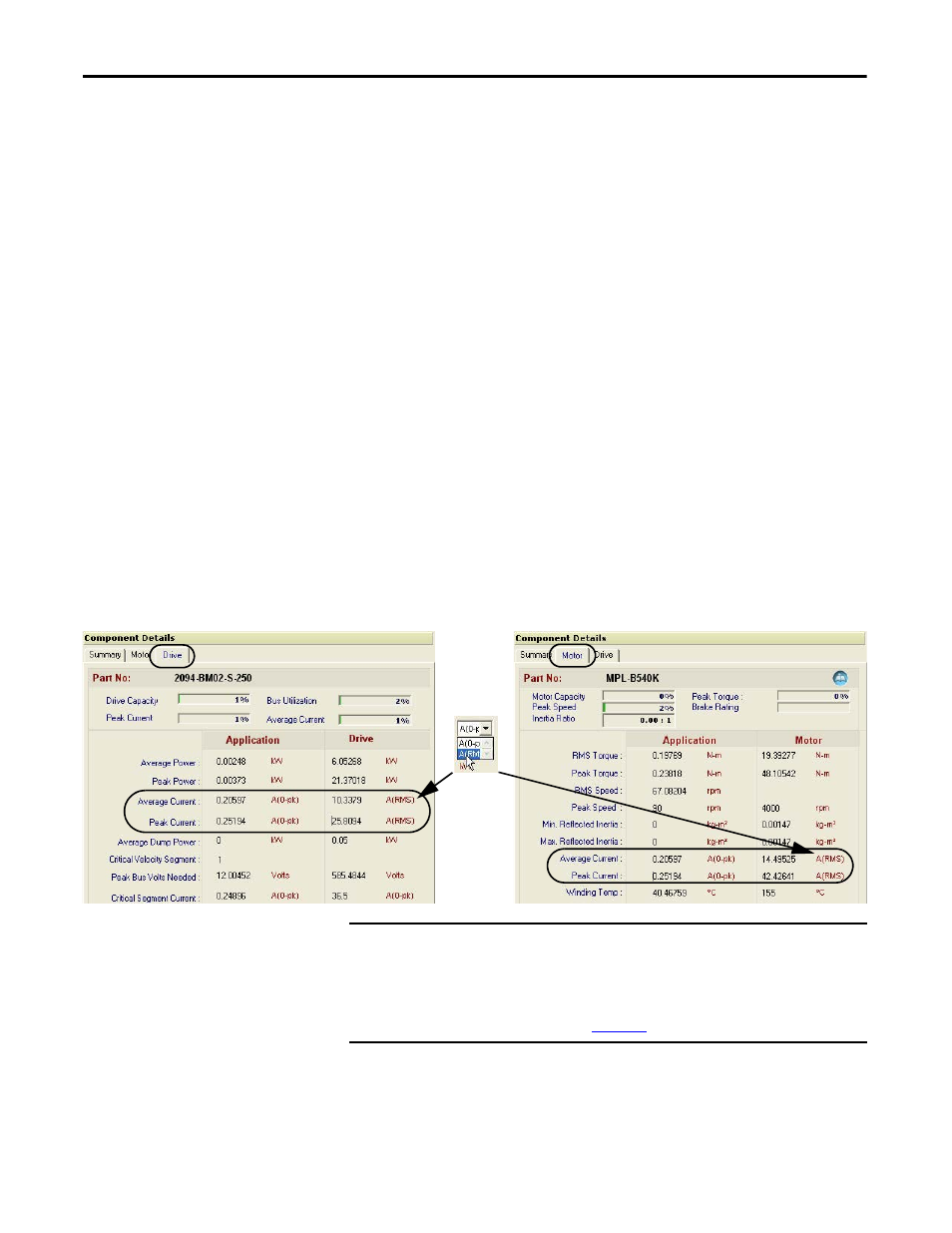
Figure 119 - Drive and Motor Data in Motion Analyzer Software
IMPORTANT
The default unit in Motion Analyzer software for drive and motor current is A
(0-pk). Because the example formula is in A (RMS), you must change the units
in the Drive and Motor tabs to A (RMS).
Pause your mouse over A (0-pk) and use the pull-down menu to change the
units to A (RMS). Refer to
Figure 119
for an example.