Rockwell Automation 2094-xMxx-S Kinetix 6000 Multi-axis Servo Drives User Manual User Manual
Page 261
Rockwell Automation Publication 2094-UM001H-EN-P - June 2013
261
Enhanced Peak Performance
Appendix F
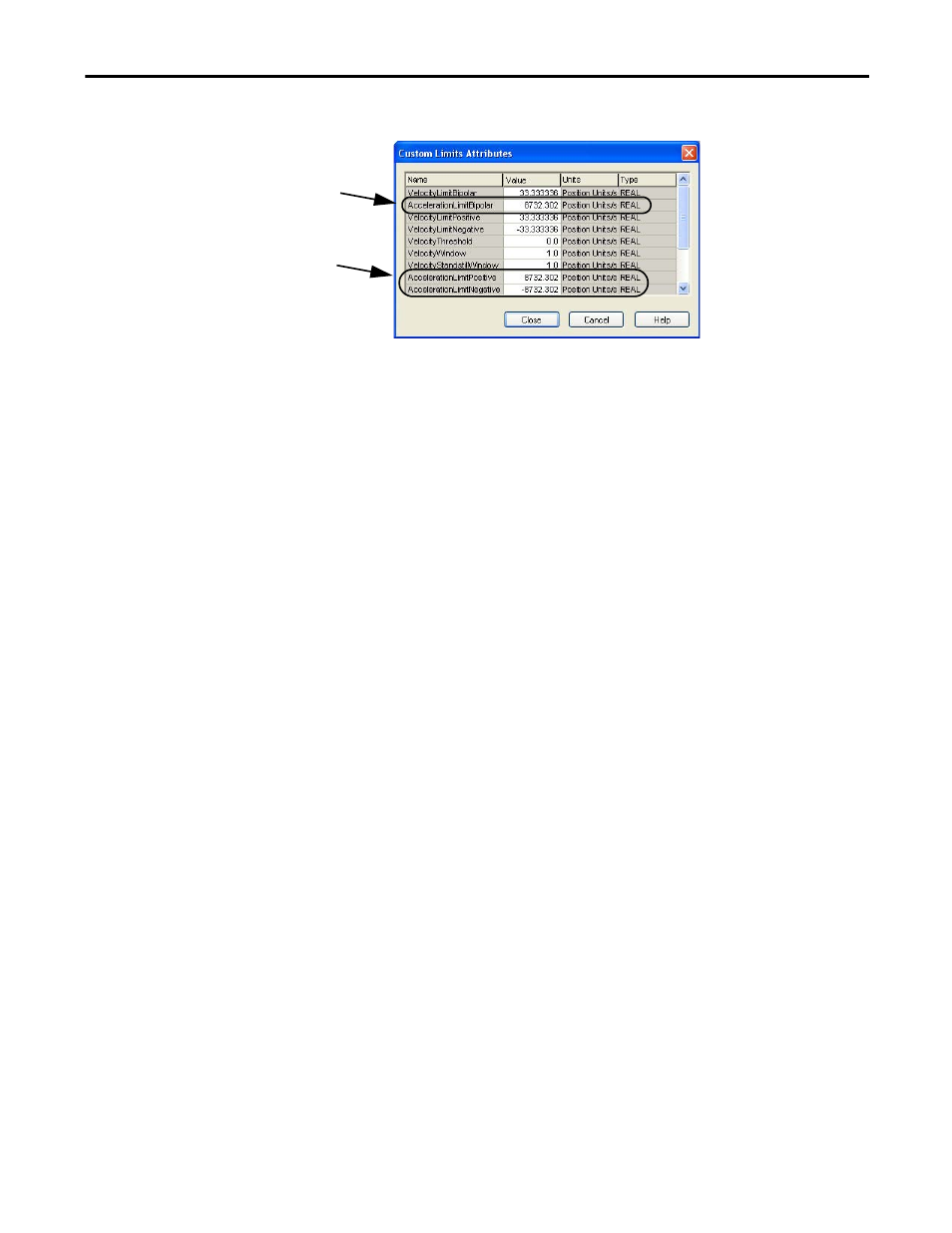
6. Click Set Custom Limits.
7. Overwrite the existing AccelerationLimitBipolar value.
In this example, the calculated value is 668.18.
8. Overwrite the existing AccelerationLimitPositive and
AccelerationLimitNegative values.
In this example, the calculated values are +668.18 and -668.18
(respectively).
9. Repeat this process for each IAM and AM module in your system.
Default AccelerationLimitBipolar Value
Default AccelerationLimitPositive and
AccelerationLimitNegative Values
This manual is related to the following products: