Rockwell Automation 2094-xMxx-S Kinetix 6000 Multi-axis Servo Drives User Manual User Manual
Page 143
Rockwell Automation Publication 2094-UM001H-EN-P - June 2013
143
Configure and Start the Kinetix 6000 Drive System
Chapter 6
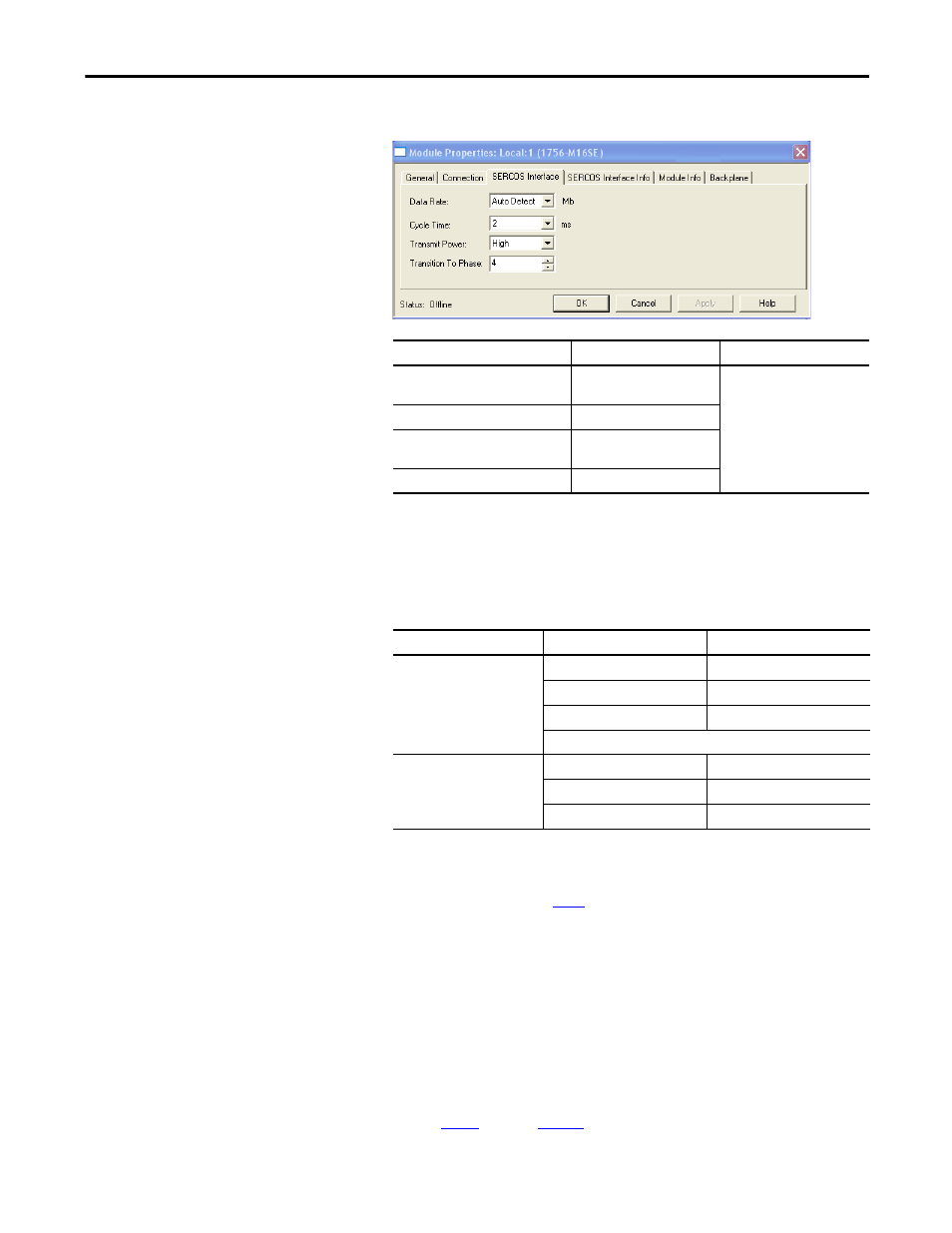
6. Click the sercos Interface tab and reference the table below.
7. Verify that the Data Rate setting matches DIP switches 2 and 3
(communication rate), as set on the IAM and AM module, or choose the
Auto Detect setting.
8. From the Cycle Time pull-down menu, choose the Cycle Time according
to the table below.
9. From the Transmit Power pull-down menu, choose High.
The default setting is High, however this setting is dependent on the cable
length (distance to next receiver) and cable type (glass or plastic).
10. Enter the Transition to Phase setting.
The Transition to Phase default setting is 4 (phase 4). The Transition to
Phase setting stops the ring in the phase specified.
11. Click OK.
12. Repeat
step 1
through
step 11
for each Logix5000 module.
Logix5000 Sercos Module
Number of Axes
Data Rate
1756-M03SE or
1756-L60M03SE
Up to 3
4 or 8 Mbps
1756-M08SE
Up to 8
1756-M16SE or
1784-PM16SE
Up to 16
1768-M04SE
Up to 4
Data Rate
Number of Axes
Cycle Time
4 Mbps
Up to 2
0.5 ms
Up to 4
1 ms
Up to 8
2 ms
No support for axes 9…16
8 Mbps
(1)
(1) The Kinetix 6000M IDM system supports only 8 Mbps and is hardwired for this setting.
Up to 4
0.5 ms
Up to 8
1 ms
Up to 16
2 ms
TIP
The number of axes/module is limited to the number of axes as
shown in
step 6
.