Rockwell Automation 2094-xMxx-S Kinetix 6000 Multi-axis Servo Drives User Manual User Manual
Page 259
Rockwell Automation Publication 2094-UM001H-EN-P - June 2013
259
Enhanced Peak Performance
Appendix F
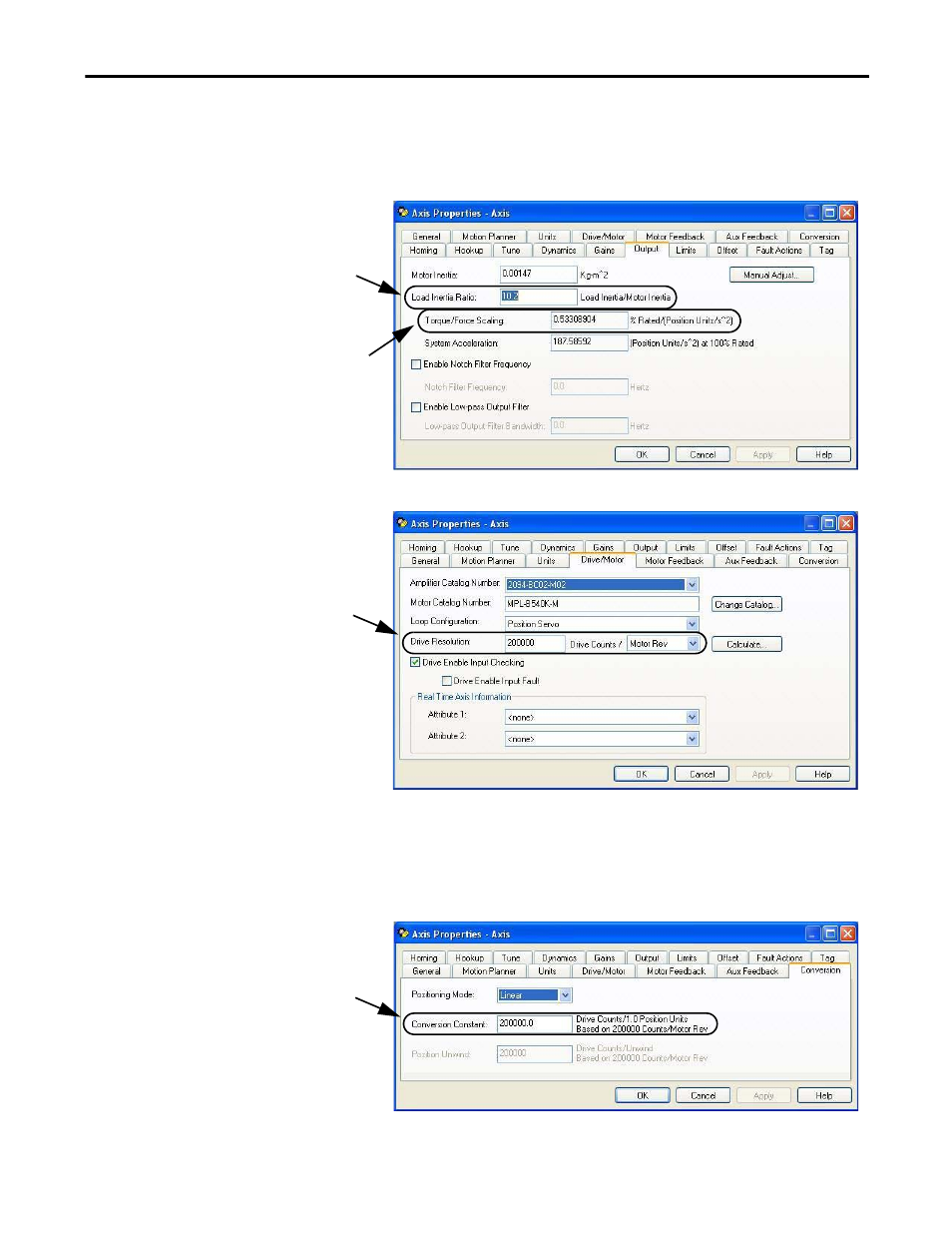
6. Change the Load Inertia Ratio value to 10.2.
7. Click Apply.
The TorqueScaling values update.
8. Click the Drive/Motor tab.
The values for DriveResolution and ConversionConstant start out
populated with default values, but can be changed for your specific needs.
If you plan to change those values, enter the new values into the dialog
boxes. Otherwise, use the defaults.
9. Click the Conversion tab.
Modified Load Inertia Ratio Value
New TorqueScaling value
used in this example.
DriveResolution value
used in this example.
ConversionConstant value used
in this example.
This manual is related to the following products: