Enhanced peak example – Rockwell Automation 2094-xMxx-S Kinetix 6000 Multi-axis Servo Drives User Manual User Manual
Page 257
Rockwell Automation Publication 2094-UM001H-EN-P - June 2013
257
Enhanced Peak Performance
Appendix F
Enhanced Peak Example
In this example, the following motor and drive combination is used:
• Drive = 2094-BC02-M02-S
• Motor = MPL-B540K
Table 129 - Example Definitions
Figure 120 - Example Torque Formula
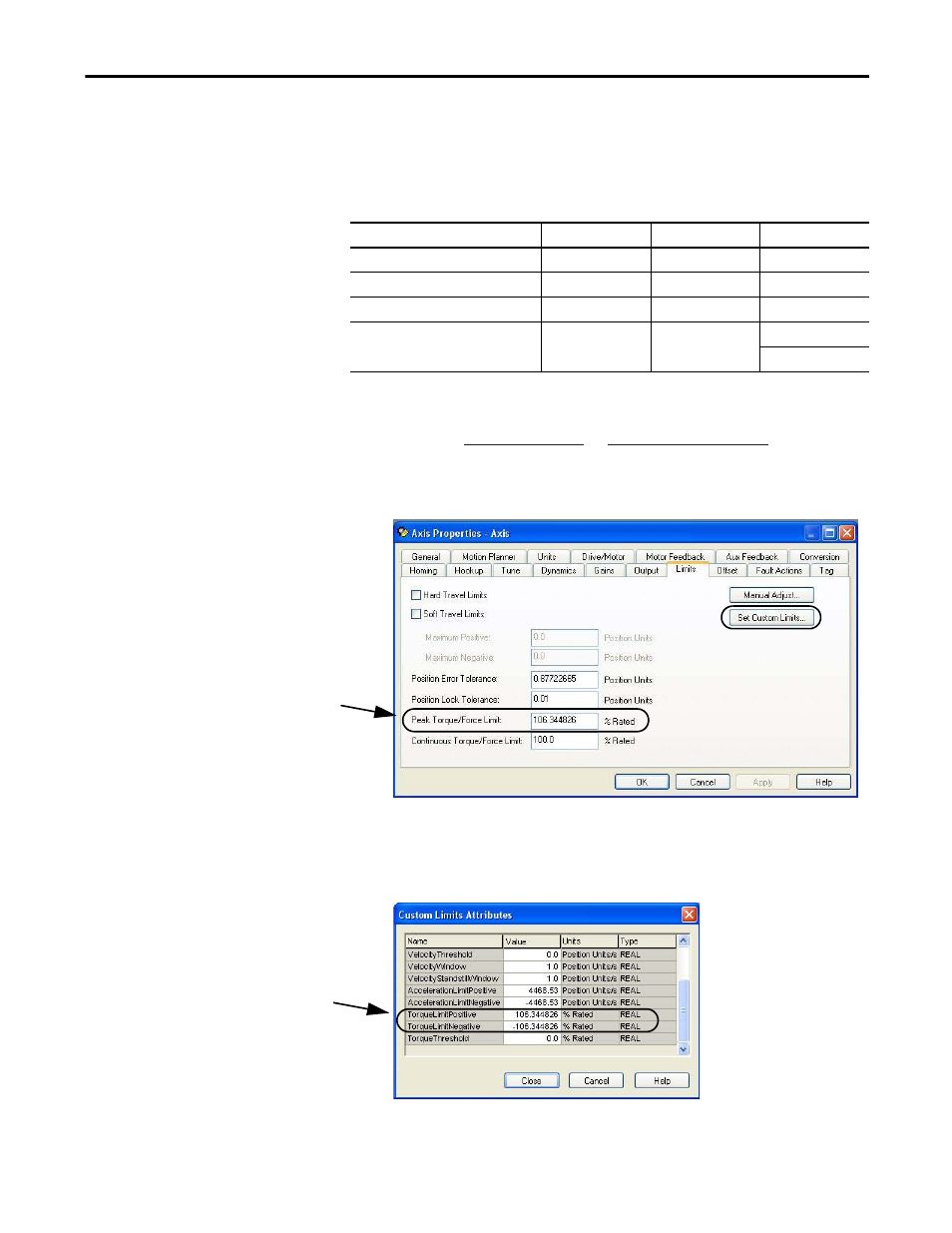
1. Navigate to Axis Properties and click the Limits tab.
2. Overwrite the existing Peak Torque Limit (TorqueLimitBipolar) value.
In this example, the calculated value is 178.1.
3. Click Set Custom Limits.
Description
Symbol
IDN
Example
Motor continuous current (A
rms
)
I
mtr, cont
S:0:0111
14.49525
Motor peak current (A
rms
)
I
mtr, pk
S:0:0109
42.42641
Drive continuous current (A
rms
)
I
dr, cont
S:0:0112
10.3379
Drive peak current (A
rms
)
I
dr, pk
S:0:0110
150%: 15.5069
250%: 25.8094
Torque
max
mtr, pk
min (I
, I )
dr, pk
=
=
mtr, cont
I
rms
min (42.4 A
, 25.8 A )
rms
= 178.1%
14.5 A
rms
Default Peak Torque Limit Value
Default TorqueLimit Values