Table 16-3. proportional cycle method, Table 16-4. step response method (ziegler-nichols) – Micromod Micro-DCI: 53MC5000 Multi-Loop Process Controller Instruction Manual User Manual
Page 300
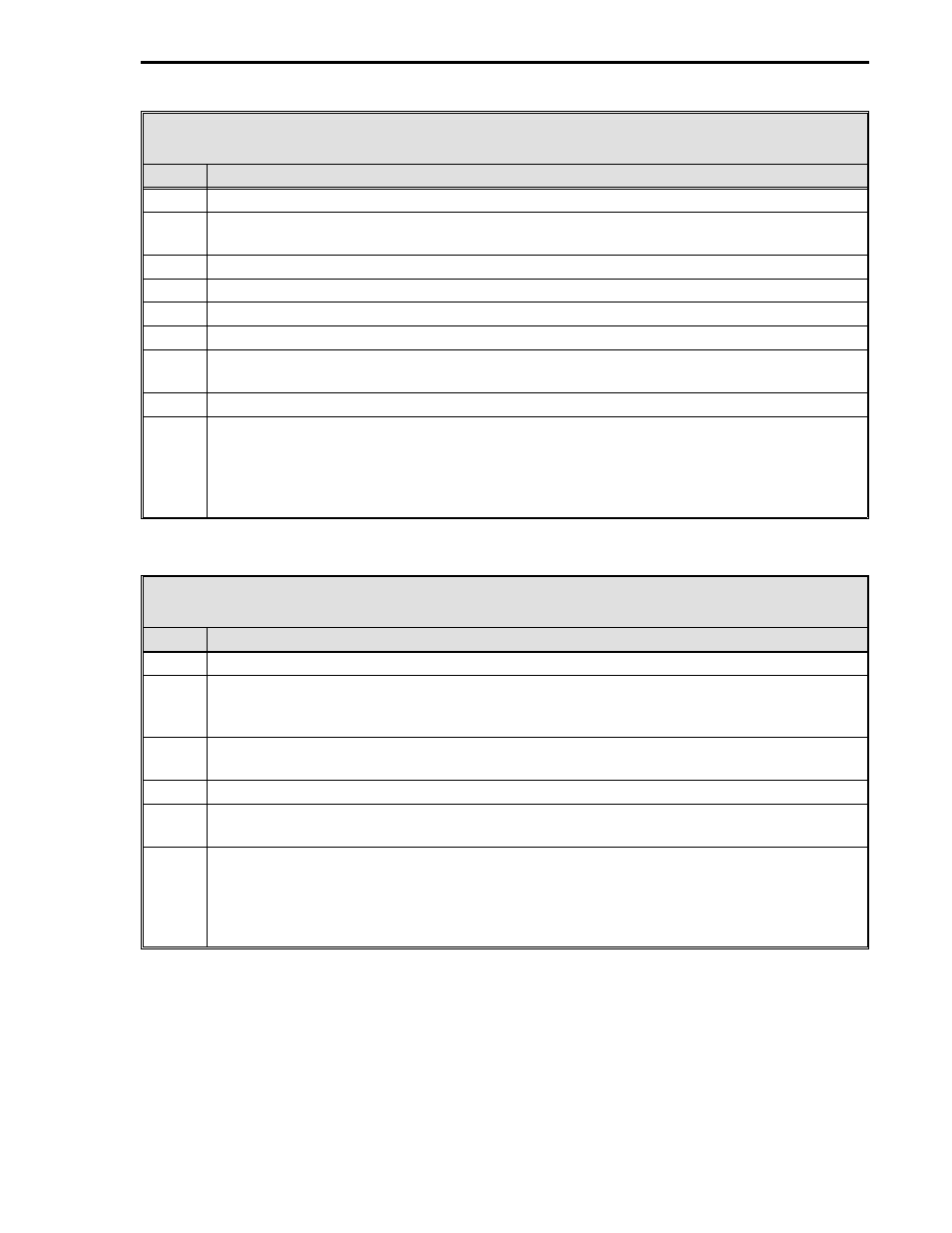
Table 16-3. Proportional Cycle Method
Step
Procedure
1
Set the process to approximately normal conditions in
Manual mode.
2
Set TR first to minimum value (0.02 minutes) for several moments, then set it to the
extreme maximum (200 minutes) to lock in a fixed reset value.
3
Set P.B. to the widest value (1000%).
4
Set TD to the lowest value (0.01 minutes).
5
Switch to
Auto mode..
6
Slowly reduce P.B. until process cycling starts.
7
When a slight cycle is repeatedly established, measure the peak-to-peak period of
oscillation and record it as
T minutes.
8
Observe the P.B. setting and record it as
P.
9
Compute the best settings as follows:
A. Proportional & Integral (PI): P.B. = 2 (P), TR = 0.8(T)
B. Proportional & Derivative (PD): P.B. = 0.8(P), TD = 0.12(T)
C. Proportional, Integral, and Derivative (PID): P.B. = 1.5(P), TR = 0.5(T),
TD = 0.12(T)
Table 16-4. Step Response Method (Ziegler-Nichols)
Step
Procedure (Reference Figure 16-1.)
1
Set the process to approximately normal conditions in
Manual mode.
2
Introduce a 10% (approximate) step change to the manually regulated signal to the
valve. Observe the magnitude of the step in percent of full signal span
F . Also plot a
graph of the resulting transient curve traced by the controlled variable.
3
Draw a straight line tangent to a point on the curve having the greatest slope (most
linear).
4
Measure the apparent dead time
L in minutes as shown in Figure 16-1.
5
Measure
RL, the product of the slope and dead time as shown in Figure 16-1. This
value should be expressed in percent of full scale span.
6
Compute the best settings as follows:
A. Proportional (P): P.B. = (100 RL) / F.
B. Proportional & Integral (PI): P.B. = (100 RL) / F, TR = 3L
C. Proportional, Integral, and Derivative (PID): P.B. = (80 RL) / F, TR = 2L,
TD = 0.5L.
Section 16. Tuning PID Parameters
16-3