Table 5-9. controller modules (con0-3) – Micromod Micro-DCI: 53MC5000 Multi-Loop Process Controller Instruction Manual User Manual
Page 166
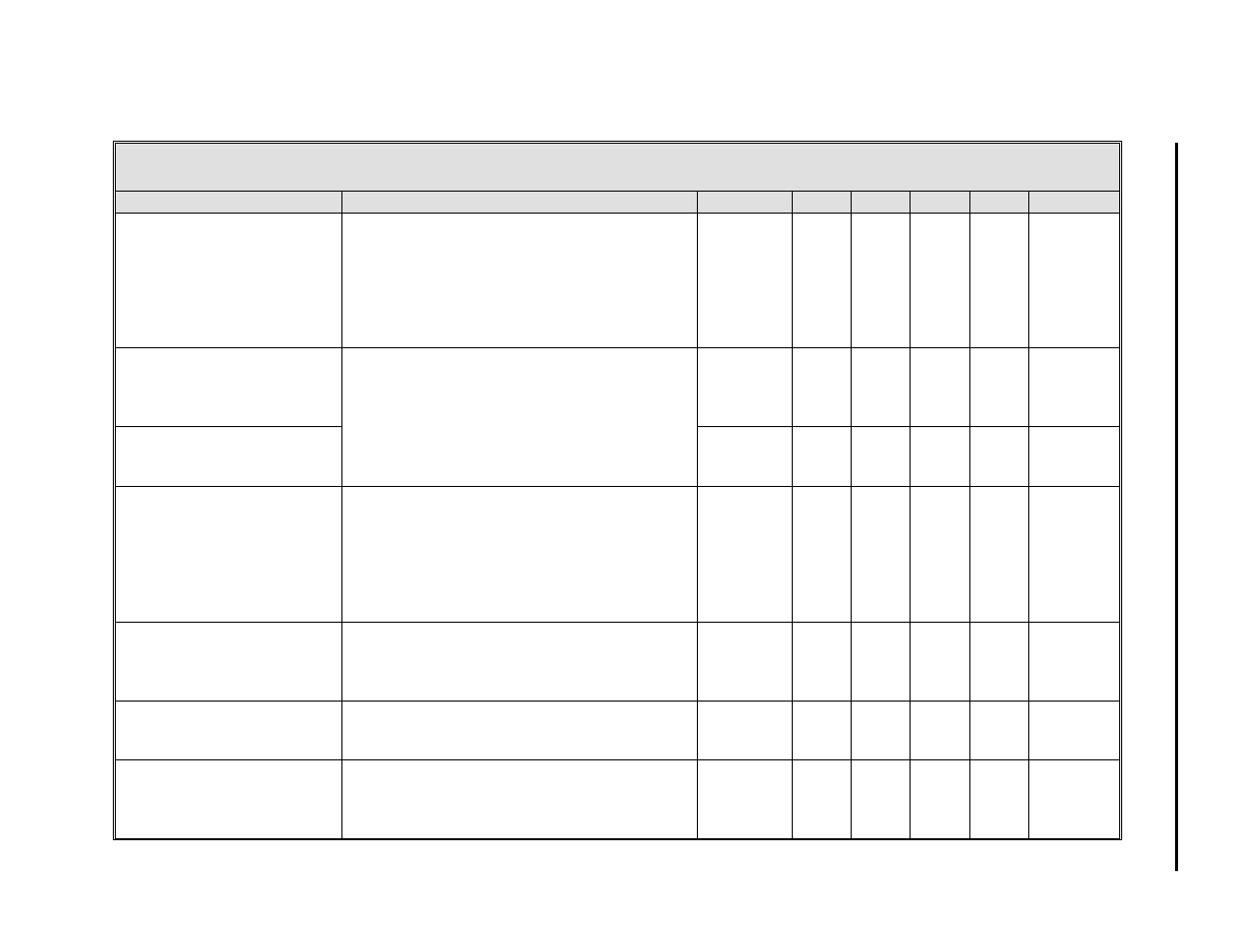
Table 5-9. Controller Modules (CON0-3)
Title
Definition
Atom
CON0
CON1
CON2
CON3
Default
Control Zone
This parameter defines a gap or dead band on
either side of the setpoint. When the process
variable is within this gap, proportional and
integral output changes are suppressed.
Note
that derivative changes are based on the PV
and are therefore not affected.
CZ
(0-3)
C114
C150
C186
C222
0
Controller Span
These two parameters set the upper and lower
values on the controller display. They permit
the control action to be defined over a range
independent of the process variable input
range. They also determine the speed at which
the setpoint changes when the up or down
arrow push buttons are pressed.
IR (0-3)
C115
C151
C187
C223
100
Controller Lower Range
ILR (0-3)
C116
C152
C188
C224
0
Setpoint Slew Rate
This parameter imposes a ramp limit on the
setpoint. When configured to a non-zero
value, the setpoint used in the PID algorithm is
allowed to change each scan time only by the
amount configured. The final value of the
setpoint is always displayed on the units
display.
T1
(0-3)
C117
C153
C189
C225
0
Output Slew Rate
This value is the maximum output change in
percent allowed for the PID algorithm. A zero
disables output slewing. This value has no
effect on the manual operation of the output.
T3
(0-3)
C118
C154
C190
C226
0
Control Setpoint
The setpoint value that has setpoint slewing
applied and is used internally to calculate the
deviation for the PID function.
TSP
(0-3)
C119
C155
C191
C227
0
Remote Setpoint
The value used to determine the setpoint when
Remote Status (RMT) is a
1 and Setpoint
Track Status (SPTS) is a
0.
SP = [RSP x K1] + B1
RSP
(0-3)
C120
C156
C192
C228
0
8 of 9
5-
2
1
Se
ctio
n 5.
Co
nf
igu
rat
ion
Pa
ra
m
e
te
rs