Figure 2-4. bus status encoding – Motorola DSP96002 User Manual
Page 11
2 - 8
DSP96002 USER’S MANUAL
MOTOROLA
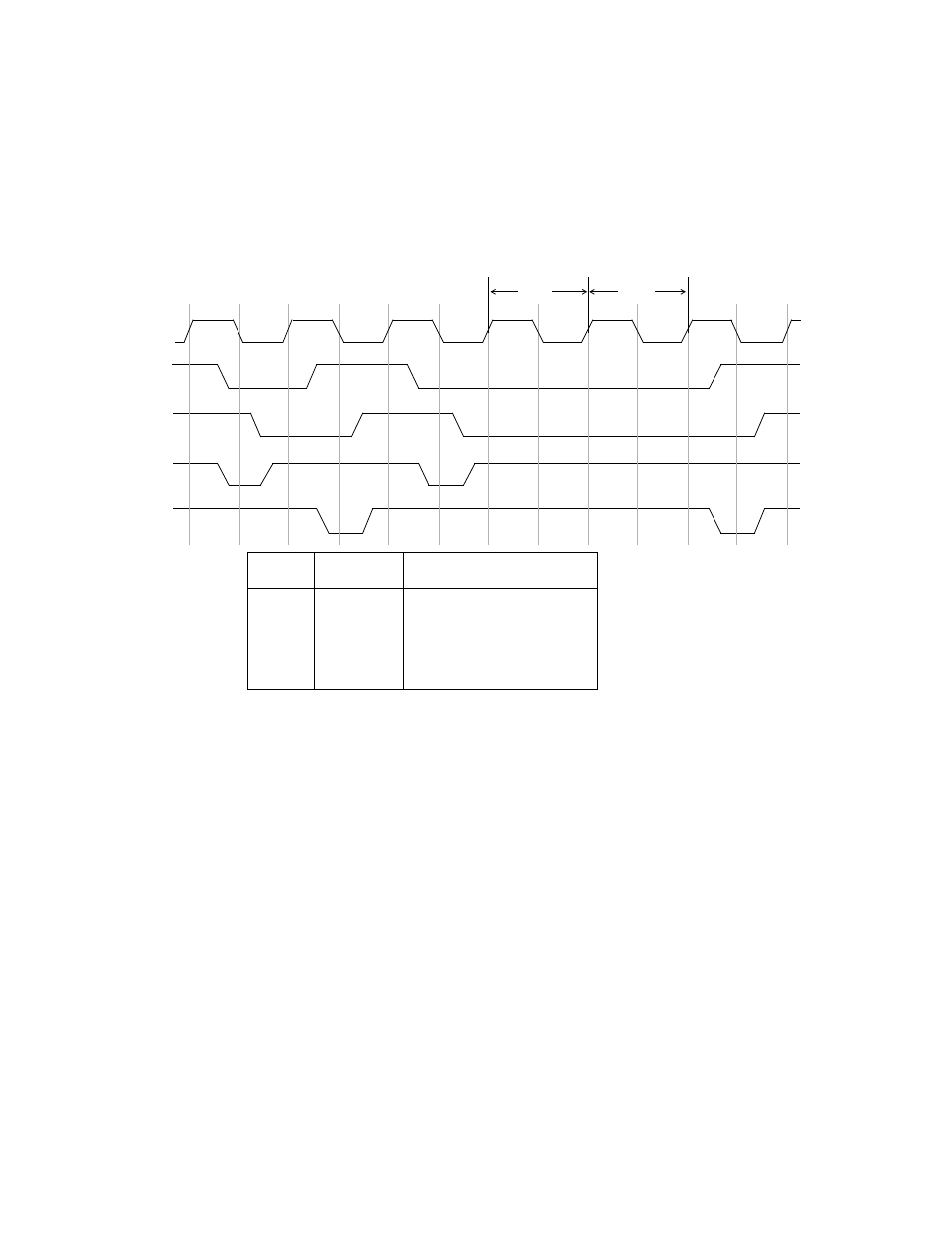
When a bus master, the combination of
—
B
–
S and
—
T
–
S can be decoded externally to
determine the status of the current bus cycle and to generate hardware strobes useful
for latching address and data signals. The encoding is shown in Figure 2-4.
—
T
–
A
(Transfer Acknowledge) - active low input. If the DSP96002 is the bus master and either
there is no external bus activity or the DSP96002 is not the bus master, the
—
T
––
A input
is ignored by the core. The
—
T
–
A input is a synchronous "DTACK" function which can
extend an external bus cycle indefinitely.
—
T
–
A must be asserted and deasserted syn-
chronous to the input clock (CLK) for proper operation.
—
T
–
A is sampled on the falling
edge of the input clock (CLK). Any number of wait states (0, 1, 2, ..., infinity) may be
inserted by keeping
—
T
–
A deasserted. In typical operation,
—
T
–
A is deasserted at the
start of a bus cycle, is asserted to enable completion of the bus cycle and is deasserted
before the next bus cycle. The current bus cycle completes one clock period after
—
T
–
A is asserted synchronous to CLK. The number of wait states is determined by the
—
T
–
A input or by the Bus Control Register (BCR), whichever is longer. The BCR can be
used to set the minimum number of wait states in external bus cycles. If
—
T
–
A is tied
low (asserted) and no wait states are specified in the BCR register, zero wait states will
be inserted into external bus cycles.
Figure 2-4. Bus Status Encoding
—
B
–
S
—
T
–
S Bus Status
Strobe Generation Application
1
1
Idle
0
1
Cycle Start
Address Strobe (
—
A
–
S)
0
0
Wait
1
0
Cycle End
Data Strobe (
—
D
–
S)
t0
t1
t2
t3
t0
t1
t2
tw
t2
tw
t2
t3
CLK
—
B
–
—
T
–
S
—
D
–
—
A
–
WS
WS