Rockwell Automation 1336E IMPACT Adjustable Frequency AC Drive User Manual V 1-4.XX User Manual
Page 324
13-12
Understanding the Auto-tuning Procedure
To use manual tuning:
1. Adjust Kp Speed Loop (parameter 159) to set how quickly the
drive responds to changes in reference and load. Higher values of
gain result in faster response to reference changes and less speed
disturbance due to changes in load. Excessive values of Kp gain
cause the motor and load to chatter as noise in the speed feedback
signal becomes amplified. Large adjustments in the Kp gain
require you to adjust the Ki gain to maintain stability.
2. Adjust Ki Speed Loop (parameter 158) to determine how quickly
the drive recovers from speed and load changes. Increasing the Ki
gain causes the drive to recover faster from a load disturbance.
Adjusting Ki gain also removes any steady state (long term)
instabilities. Excessive values of Ki gain cause the system to
become oscillatory and unstable. For higher bandwidth systems
(systems with bandwidths over 3 to 5 radians/second), Ki is larger
than Kp. For low bandwidth systems, Kp is larger than Ki.
3. Verify affects of the Kp and Ki gain adjustments using a small
step change in speed reference and/or load. Large changes (more
than a few percent) cause the regulator to enter a limit condition
and make checking the response difficult. You may need to
repeatedly adjust the Kp and Ki gain to get the desired response,
as these two gains interact with each other. Make only small
adjustments at a time and then check the results.
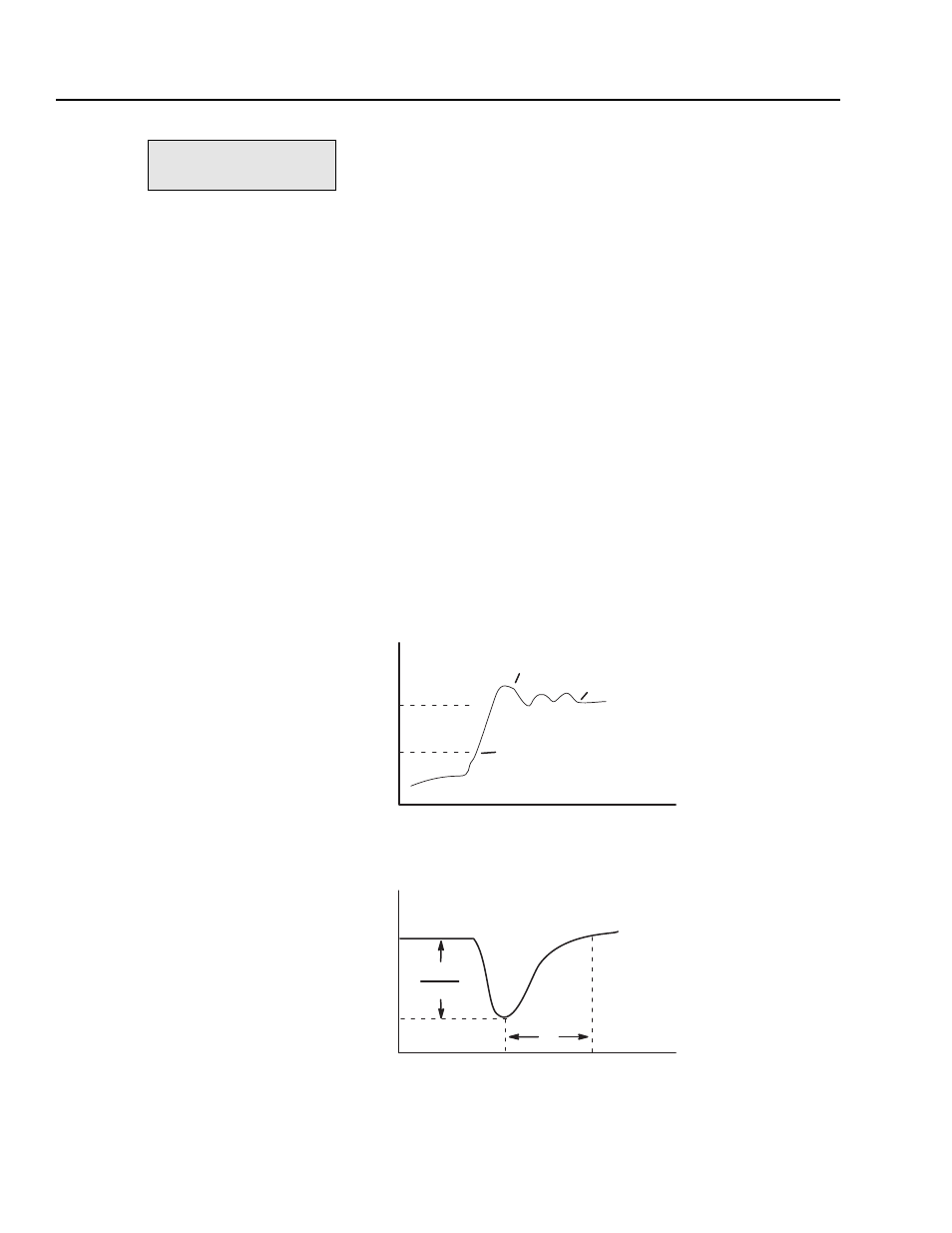
Figure 13.1
Speed Regulator Small Reference Step Response (50% to 53% Step)
Figure 13.2
Speed Regulator Step Load Disturbance Response
file:
Control
group:
Speed Regulator
53%
0%
Speed
Time
Kf
Ki
Kp
51%
50%
0
Speed
Time
∆ Load
Kp
Ki