Speed profiling introduction, Speed profiling introduction -16 – Rockwell Automation 1336E IMPACT Adjustable Frequency AC Drive User Manual V 1-4.XX User Manual
Page 156
9-16
Applications
Speed Profiling Introduction
This feature provides a series of 16 programmable steps that allow
you to program a sequence of speed command transitions. Each step
can be activated based on time, digital inputs, or encoder counts. The
profile can be used as a single sequence with a return to a “home”, or
as a continuous loop, returning to an initial step value each time. This
feature can be used for simple positioning requirements on
applications such as turntables, hemmers, gantries, run-out tables,
transfer shuttles and station gates.
NOTE: The Speed Profile feature is not intended to be used in
conjunction with certain other features in the drive. These include
Function Blocks, Process Trim or Bus Regulation. Using these
features in combination with Speed Profiling may result in
inconsistent operation that cannot be guaranteed.
The Speed Profile is configured using a command word, and end
action parameters. Each available step is configured with three
parameters, which define the speed (in RPM) to operate during the
step and when to end the step. The amount of travel for each step is
controlled by the type of trigger which ends or terminates the step and
is based on time, encoder count, or digital input. In addition,
parameters for monitoring and status information are available.
The Profile Enable Parameter (P235) enables the profile, defines the
“home” position, begins the actual sequence, and allows for a profile
“Hold” (Refer to page 9-21). In addition, it defines how to transition
between each profile step. An enable bit sets the “Home” position,
and must be set to 1 for the profile feature to operate. “Home”
position is redefined any time this bit is toggled to a 1. A run
Sequence bit, is used to actually begin the sequence operation, once a
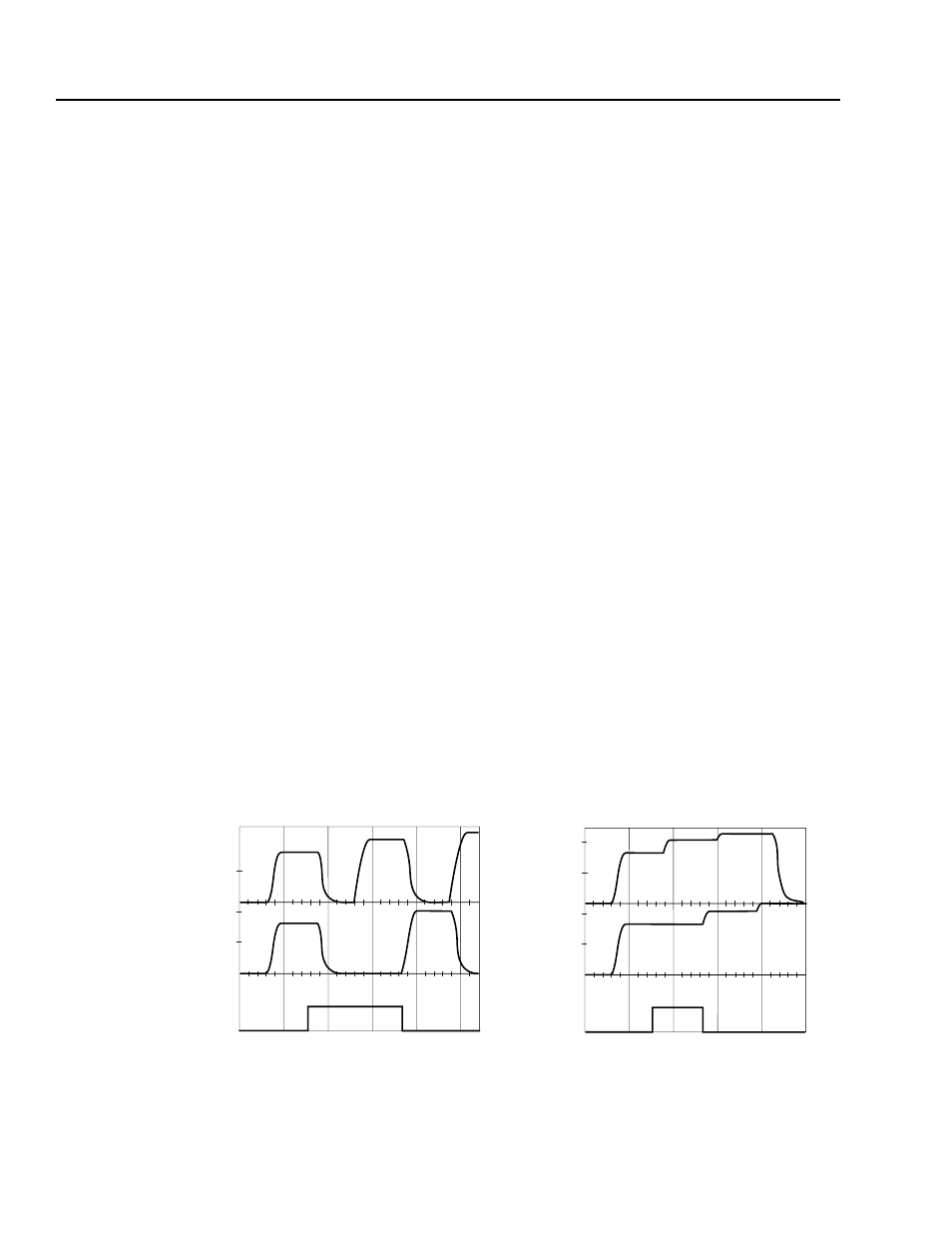
start command has been given to the drive. An Encoder Velocity
Blend bit defines if the drive will come to zero speed between each
step, or “blend” the step value, and make a smooth transition from
one step speed to another. An example of this is shown below.
Normal
RPM
Encoder Step Profile
"Unblended" Operation
Time Step/TB Input Step or
Blended Encoder Step Profile
1000
500
0
1000
500
0
with
Hold
Hold
Input
Normal
1
2
3
1
2
3
1
2
1
2
3
RPM
1000
500
0
1000
500
0
with
Hold
Hold
Input