Choosing an optional braking/decelerating method – Rockwell Automation 1336E IMPACT Adjustable Frequency AC Drive User Manual V 1-4.XX User Manual
Page 143
Applications
9-3
To select the motor simulation mode, enter a value of 3 in Fdbk
Device Type (parameter 64). When you run simulation mode, the
torque and flux current commands for the motor are set at near zero
levels. Little, if any, torque is produced at the motor. A simulated
motor speed is calculated based on the level of internal torque
reference and total inertia. The speed regulator responds as if the
motor were present and connected to the drive.
Choosing an Optional
Braking/Decelerating Method
Bus/Brake Opts (parameter 13) lets you choose a braking/
decelerating method. The following options are available:
Choose the braking/decelerating method that works best for your
motor and load.
You may also want to review the standard stop types that are available
for the drive. These are covered in the Speed Reference Selection
Overview section in Appendix B, Control Block Diagrams.
Using Dynamic Braking/Brake Chopper
Dynamic braking uses an external braking device to dissipate the
excess energy when the drive is decelerated. This setup disables the
bus voltage regulator and relies on the dynamic brake to dissipate the
excess regenerated energy.
Important: The dynamic brake must be connected to the capacitor
side of the DC link choke (output side). If the brake is connected to
the converter bridge of the DC link choke (input side), it will fail.
To use a dynamic brake:
1. Set bit 10, Brake/Regen, in Bus/Brake Opts (parameter 13).
2. Clear bit 5, Bus High Lim, in Bus/Brake Opts (parameter 13).
3. Refer to the manual that came with your brake for further
information.
4. Set Regen Power Lim (parameter 76) according to the available
braking power. If the brake is sized for maximum regenerative
energy, then the Regen Power Lim (parameter 76) may be set to
its highest value.
5. If overvoltage occurs, see below.
If bus overvoltages occur, then the brake is not large enough to
dissipate the excess energy. Either increase the brake size or limit
regenerative energy until the overvoltages no longer occur.
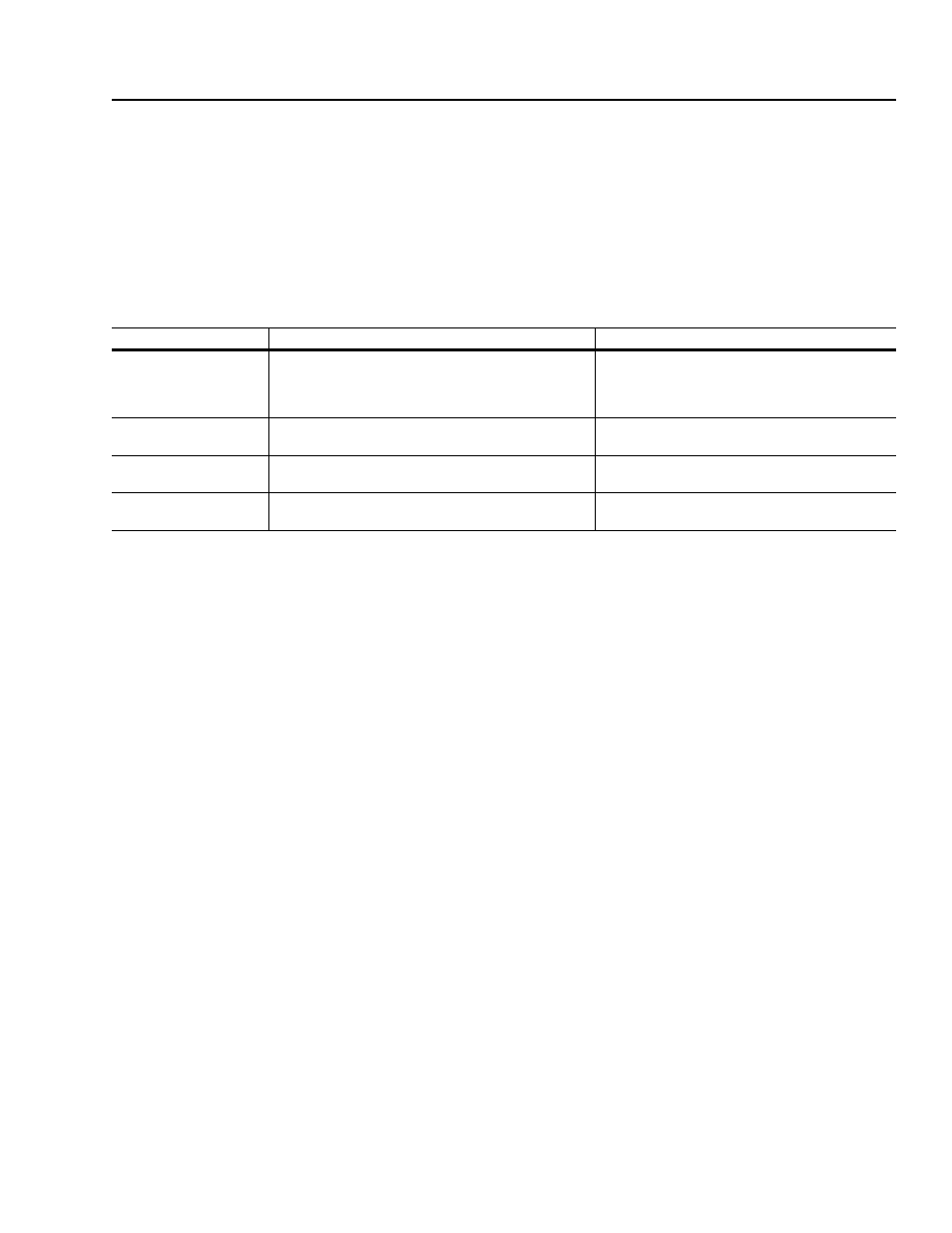
This method:
Uses:
To select this method, you need to:
Dynamic braking
An external braking device. The full drive power is
available for stopping. You must use this method if a linear
and controlled speed deceleration is required. The other
braking methods result in non-linear stop profiles.
Set bit 10, Brake/Regen, in Bus/Brake Opts.
Bus regulator
Regen Power Lim (parameter 76) to reduce the
regenerative torque to limit the bus voltage in the device.
Clear bit 10, Brake/Regen, and bit 6, Flux Braking, in
Bus/Brake Opts.
Flux braking
An increase in the motor flux to increase the motor losses.
Set bit 6, Flux Braking, and clear bit 10,
Brake/Regen, in Bus/Brake Opts.
DC braking
DC current to increase the motor losses.
Set bit 9, DC Brake, and clear bit 10, Brake/Regen, in
Bus/Brake Opts.