Cnc programming, G functions overview of g functions – Lenze ETC Motion Control User Manual
Page 92
CNC programming
G functions
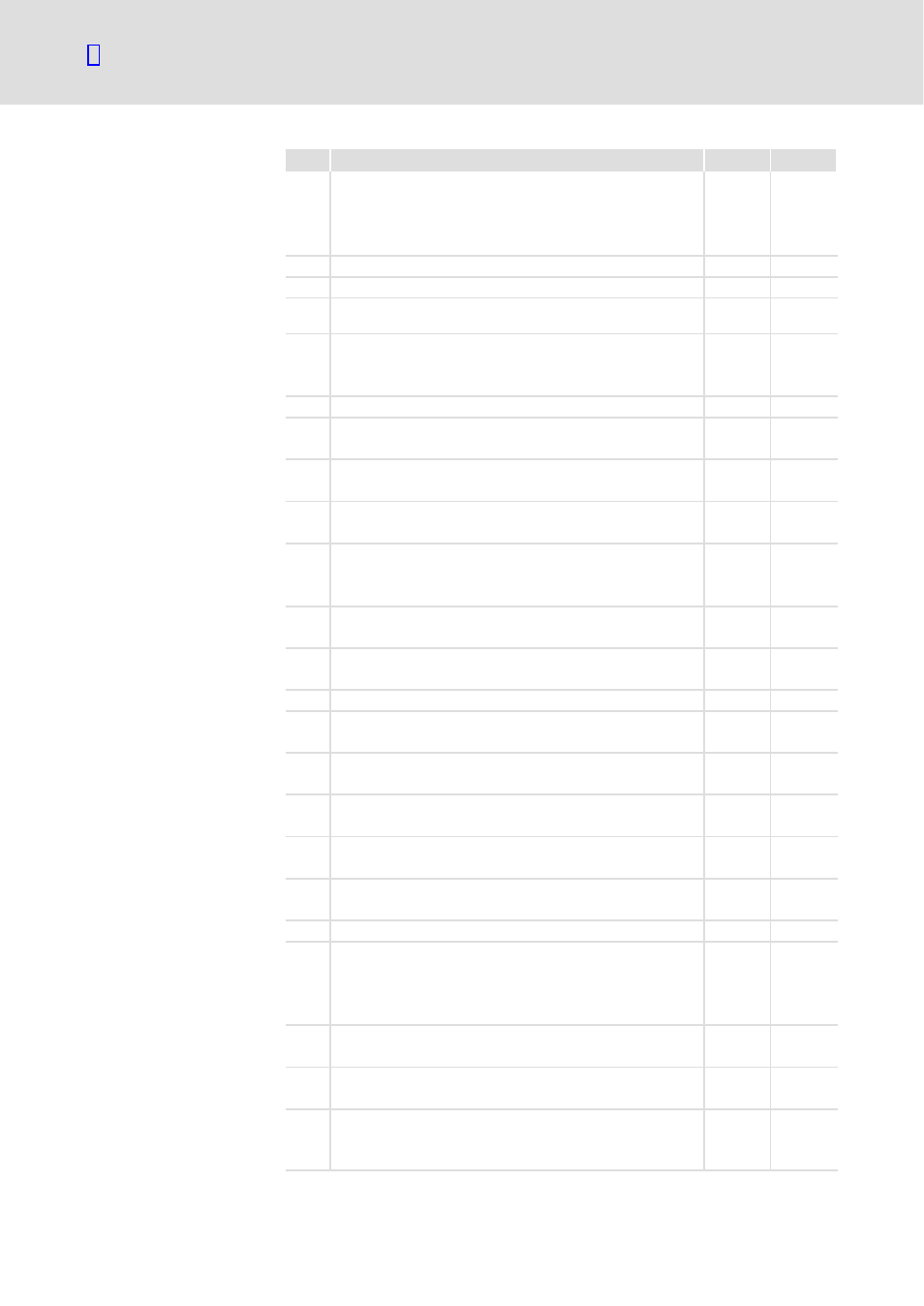
Overview of G functions
3.2
3.2.1
l
92
EDSTCXN EN 2.0
Attribute
Group
Meaning
No.
16
Definition of the principal axes of the current NC channel
h
s
17
Plane selection (XY)
c
i
18
Plane selection (XZ)
c
i
19
Plane selection (YX)
c
i
20
Block jump, optionally with condition check
I
21
Synchronous parameter field assignment
22
Subprogram call, optionally with condition check and start of a
new NC channel
I
24
Define negative traversing range limit
h
25
Define positive traversing range limit
h
26
Activate/deactivate traversing range limits
h
27
Block jump with repetition counter
i
30
Route operation
b
s
31
Path operation
b
s
33
Coupling between path and rotation axes "on"
h
2)
34
Path coupling "off"
h
36
Modal oscillation "on"
h
3)
s
37
Modal oscillation "off"
h
s
40
Correction module "off"
e
i
41
Correction module / left "on"
e
4)
i
42
Correction module / right "off"
e
4)
i
53
Deactivate temporary coordinate shift
f
i
54
Temporary zero shift of the current tool coordinate system
f
2)
i
60
Exact positioning on/off
h
2)
i
61
Stop block preprocessing
s
74
Home position approach
s
75
Change scaling factor for input units
h
2)
i
76
Change scaling factor for pulse evaluation
h
2)
88
Basic rotation
h
s
89
Profile rotation
h
2)
s
90
Absolute dimensions (reference dimension)
d
i
91
Incremental dimensions
d
i
92
Relative zero shift of the current coordinate system
f
i
93
Absolute zero shift of the current coordinate system
96
Programming of spindle circumferential speed
g
97
Programming of spindle speed
99
Subprogram return
i
100
Polar coordinates: linear interpolation, high rate
a
101
Polar coordinates: linear interpolation
a
102
Polar coordinates: circular interpolation, clockwise
a
103
Polar coordinates: circular interpolation, counterclockwise
a
110
Polar coordinates: accept center
110
Polar coordinates: accept center
i
112
Tangential correction "on"
h
i
113
Tangential correction "off"
h
i
114
6 axes transformation (X,Y,Z,A,B,C)
h
2)
s
115
Sheath transformation
h
2)
s
116
Rotation axis transformation (B,C) −> (A,B‘)
h
2)
s