Spectra Precision ProFlex 800 Reference Manual User Manual
Page 166
152
Web Server Help Files Collection
Rover
Use this area to specify the position computation mode used
as well as the type of base the rover will be working from.
Antenna
Use this area to define the parameters of the antenna used
physically at the rover, as well as a virtual antenna if
necessary. A virtual antenna may be defined to allow the rover
to deliver raw data as if those were collected with this
antenna.
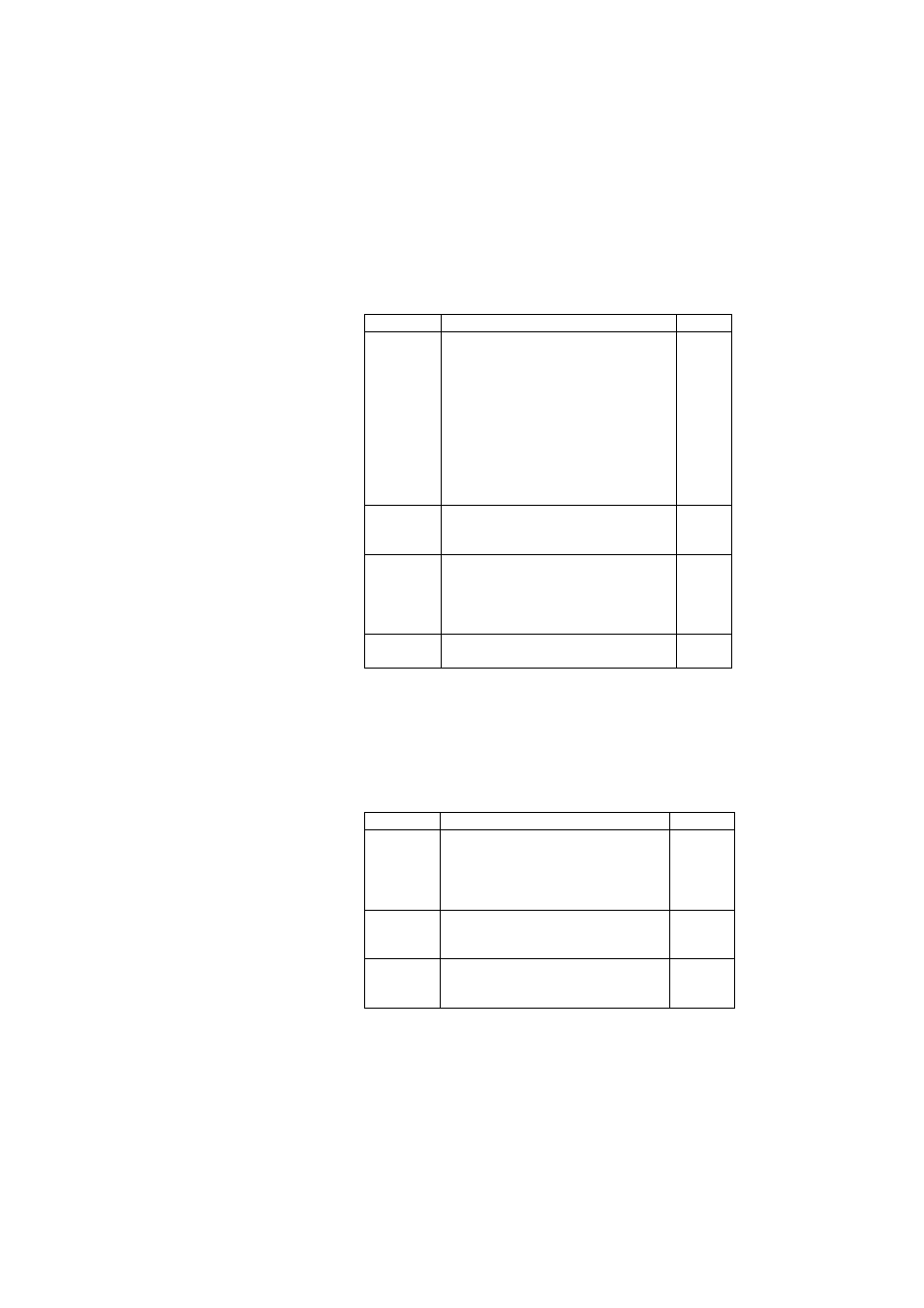
Parameter
Designation
$PASHS
Ambiguity Fix-
ing
Define the confidence level required of every RTK
solution to be valid. The possible choices are:
• 0: The rover will stay in “Flying RTK” mode (float
mode) once this type of solution is obtained
(RTK solution never delivered).
• 95.0: 95% of the measurements need to pass
the internal quality tests.
• 99.0: 99% of the measurements need to pass
the internal quality tests.
• 99.9: 99.9% of the measurements need to pass
the internal quality tests.
CPD,AFP
Fast RTK
Set this option as follows:
• Check it to enable Fast RTK.
• Clear it to disable Fast RTK.
CPD,FST
Moving Base
Keep this box cleared for a rover using a static
base, check it if the rover will be working from a
moving base.
Enabling the Moving Base option will clear the Fast
RTK option if it was enabled previously.
CPD,MOD
Dynamic
Choose the dynamic model that best suits the
rover motion.
DYN
Parameter
Designation
$PASHS
Reference
Position
Select one of the options below to define the ref-
erence location of the antenna:
• L1 phase center
• Antenna Reference Point (ARP)
• Ground mark
ANR
Measurement
Type
Specify the type of measurement (“Slant” or “Ver-
tical”) through which the above antenna height
was measured.
ANH
Antenna
Height
Enter the measured antenna height according to
the measurement type used and the selected dis-
tance unit.
ANT or ANH