Function library, Function blocks – Lenze EVS9332xK User Manual
Page 55
Function library
Function blocks
3.2.3
Function block CDATA
3−27
l
EDSVS9332K−EXT EN 4.0
)
Note!
l
The CDATA function block does not include a profile generator. The profiles must
be generated via additional function blocks (e.g. RFGPH2 or RFGPH2)
Also see example (
l
Do not select constant values at CDATA−TP−SPEED−LIM
(e.g. via free codes FCODE).
Correction of the X position via the sensor
If the sensor switches,
l
the value read in at CDATA−TP−POS is compared to the master angle and the compensation
process selected is carried out and
l
at the same time the corresponding Y position is output at CDATA−YOUT and CDATA−DFOUT
(caution: the drive follows its position setpoint with the max. possible torque).
0
1
X 5 / E 5
C 1 3 2 2 / 8
C 1 3 2 3 / 8
C 1 3 2 2 / 5
C 1 3 2 3 / 5
C 0 4 3 0 / 5
C D A T A - X - T P / E 5
C D A T A - X - T P
C 1 3 3 1 / 1
T P - C T R L
0
1
C 1 3 2 2 / 1 6
C 1 3 2 3 / 1 6
C D A T A - T P - E D G E - S E L E C T
fb_cdata_4
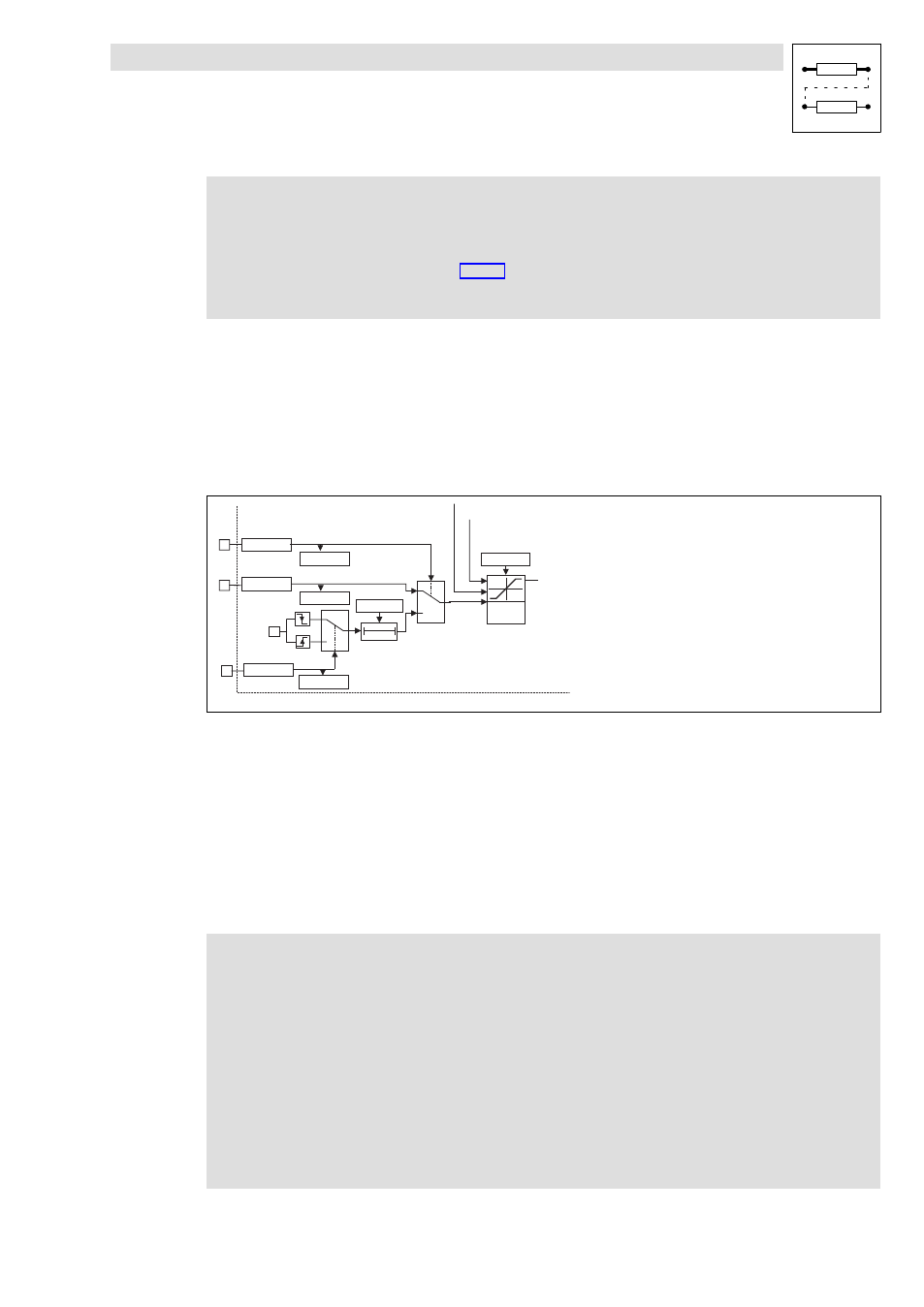
Fig. 3−8
Section of function block CDATA
1. Set CDATA−X−TP/E5 = HIGH to activate the function.
2. Connect the sensor X5/E5.
3. Define the edge of the sensor signal which is to be evaluated:
– CDATA−TP−EDGE−SELECT = LOW: HIGH−LOW edge of the sensor signal is evaluated.
– CDATA−TP−EDGE−SELECT = HIGH: LOW−HIGH edge of the sensor signal is evaluated.
4. Enter the position of the sensor at input CDATA−TP−POS (in the Lenze setting, the input is
connected to C1476/16).
)
Note!
l
For a synchronisation via touch probe, C1335 has to be set to 1.
l
The input values at CDATA−TP−POS must correspond to the clock pulse
(CDATA−ACTLEN):
– For a clock pulse of e.g. 360°, only values in the range of −359° ... +719° may be
selected at CDATA−TP−POS.
l
Check the linking of terminal X5/E4 in the DIGIN function block. Where required,
adapt the linking to your application.
l
When responding, sensors may have delay times which cause a
speed−dependent angular offset. This can be especially annoying at high speeds.
The correction value for the angular offset can be entered in x.xxx[ms] via
C0430/5.