Function library, Function blocks – Lenze EVS9332xK User Manual
Page 301
Function library
Function blocks
3.2.85
Ramp function generator for angle signals (RFGPH1)
3−273
l
EDSVS9332K−EXT EN 4.0
The following modes can be set with C1409 for this input:
C1409
Mode
Explanation
0
Absolute value generation
(Default setting)
The output RFGPH1−OUT always reaches its end value (with negative and positive speeds).
1
Forward/backward movement
The output RFGPH1−OUT with positive values (speeds) at input RFGPH1−DFIN reaches its final value
(value at the input RFGPH1−IN).
The output RFGPH1−OUT runs with negative values (speed) at input RFGPH1−DFIN to the value which
was pending at the RFGPH1−IN before. This is indicated at the output RFGPH1−IN−OLD.
The gradient of the function is determined by the inputs IN/DIST.
2
Forward/backward movement
with end value
This mode is similar to C1409=1, the only difference, however, is that if the output RFGPH1−OUT has
reached the value at input RFGPH1−IN, the output keeps this value (even if a negative value occurs
at RFGPH1−DFIN). Only if a new value is applied to the RFGPH1−IN input or if RFGPH1−RFG−0 = 1, the
output may change again.
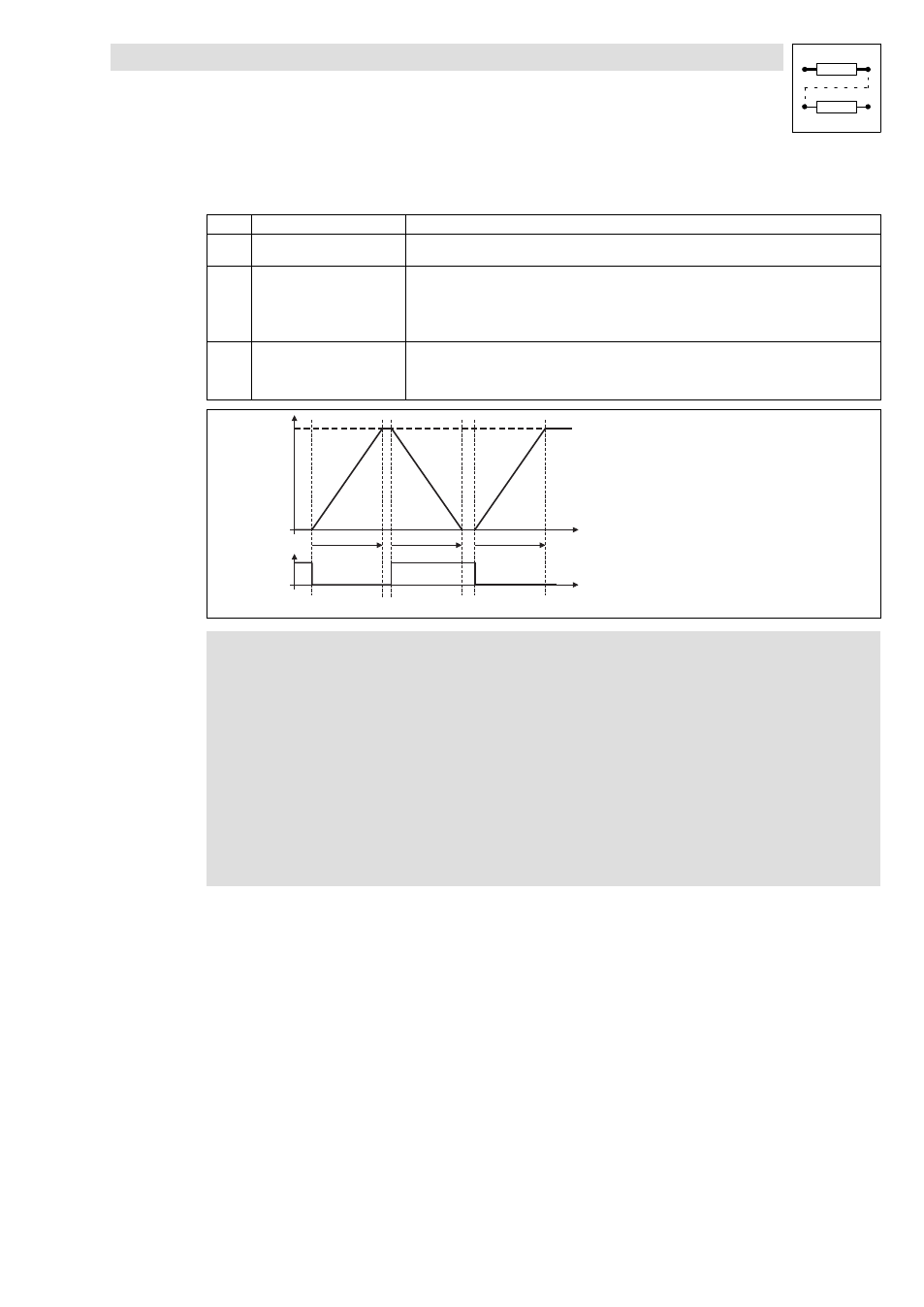
s
s
R F G P H 1 - R F G - 0
R F G P H 1 - I N
R F G P H 1 - O U T
R F G P H 1 - D I S T
R F G P H 1 - D I S T
R F G P H 1 - D I S T
)
Note!
l
Values at RFGPH1−IN are only permitted to change if RFGPH1−OUT = 0 or if the
RFGPH1−OUT output is still approaching its final value at RFGPH1−IN.
l
While the output signal at RFGPH1−OUT is approaching its final value, the sign of
the setpoint at RFGPH1−IN must not be reversed.
l
The drive to be adjusted must catch up a distance of 2.5 m−units set in
RFGPH1−IN while the master drive covers a distance of 10 m−units. Its speed is
determined by the speed of the master drive (RFGPH1−DFIN) and the path
difference (RFGPH1−DIST).
l
When the master value has covered the distance (RFGPH1−DIST), then
RFGPH1−OUT = RFGPH1−IN. Hence, the process of position change is
completed. Master drive and electronic cam run in synchronism again.