Function library – Lenze EVS9332xK User Manual
Page 118
Function library
Function blocks
3.2.23
Virtual clutch (CLUTCH2)
3−90
l
EDSVS9332K−EXT EN 4.0
3.2.23.1
Clutch engagement through ramp function with following synchronous running
X
max
t
n
t
n=const.
0
1
X
2
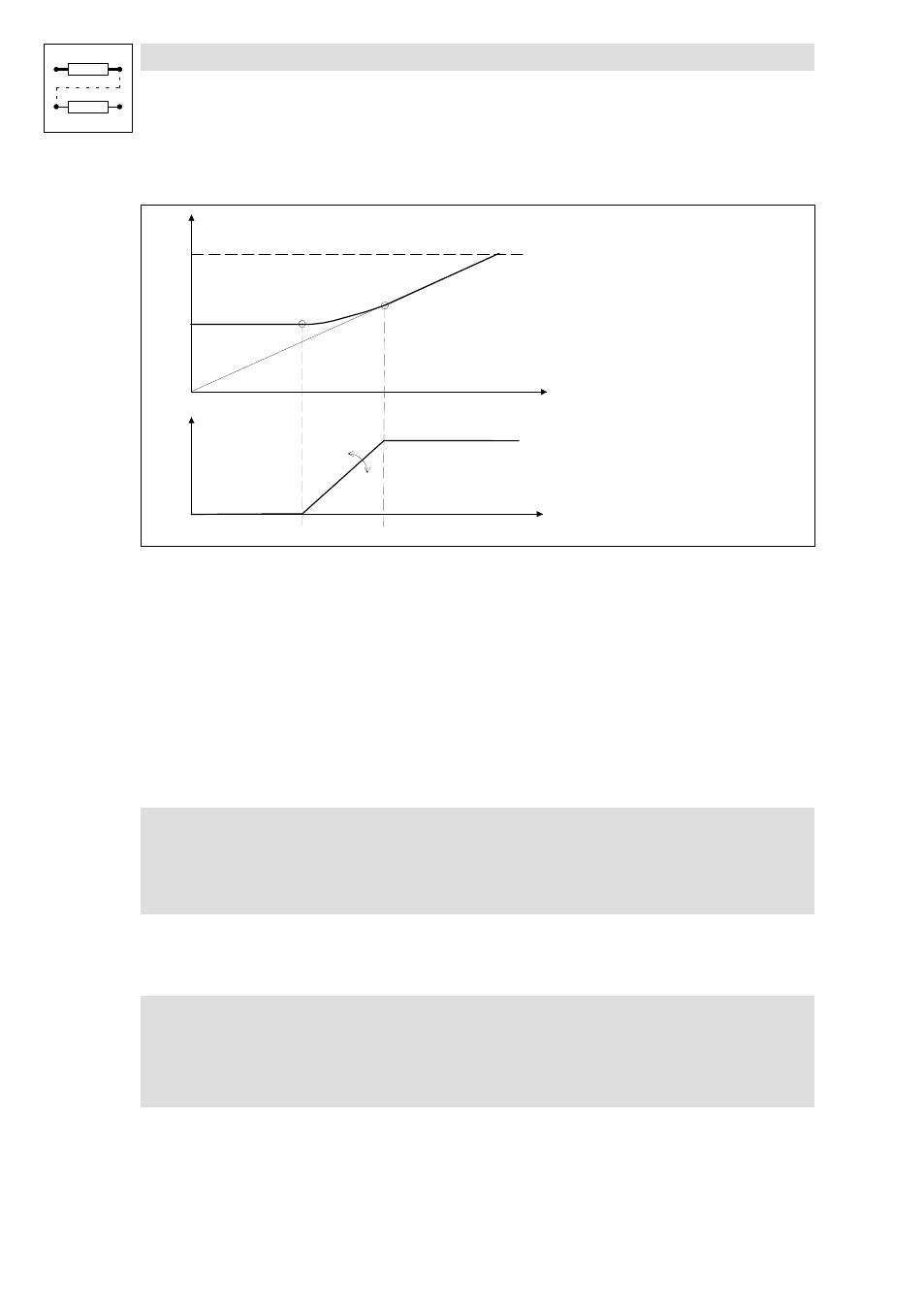
Fig. 3−60
Transition characteristic of a cam drive when engaging the clutch and then running synchronously
After the cam drive has paused − mostly process−related − it can be synchronized again to the process
with a constantly operating master drive with CLUTCH2. At the time of engaging
1 both drives have
synchronous speeds and the same positions.
In Fig. 3−60,
0 the catching−up process is started. The distance required at this time(CLUTCH2−DIST)
is calculated from the following parameters:
l
Ramp gradient, code C1412/5 (see Fig. 3−60,
2)
l
n
max
of the cam drive
CLUTCH2−DIST is available at the output of the function block and is a measure for the distance still
to be caught up. If CLUTCH2−DIST = 0, the clutch can be closed (CLUTCH2−CLOSE = HIGH) due
to the synchronous behaviour of both drives (Fig. 3−60,
1).
)
Note!
l
Clutch engagement only possible when drive is rotating in CW direction.
l
Connect the output CDATA−ACTLEN (function block CDATA) with the input
CLUTCH2−LEN to determine the position of the X axis (master).
3.2.23.2
Direct clutch engagement
The clutch immediately closes when CLUTCH2−SEL = HIGH.
)
Note!
Please observe that the command CLUTCH2−SEL = HIGH has priority over all other
commands at function block CLUTCH2.
This function is only suitable for drives at stand still.
3.2.23.3
Disengagement of the clutch
When CLUTCH2−CLOSE = LOW the clutch is opened immediately. The drive is braked to standstill
via an adjustable ramp (C1412/4).