Siemens 440 User Manual
Page 30
Parameter Description
Issue 01/06
MICROMASTER 440 Parameter List
30
6SE6400-5BB00-0BP0
r0024
CO: Act. filtered output freq.
Min: -
Datatype: Float Unit:
Hz
Def:
-
P-Group: CONTROL
Max: -
Displays actual output frequency. Slip compensation, resonance damping and frequency limitation are
included.
r0025
CO: Act. filtered output voltage
Min: -
Datatype: Float Unit:
V
Def:
-
P-Group: CONTROL
Max: -
Displays [rms] voltage applied to motor.
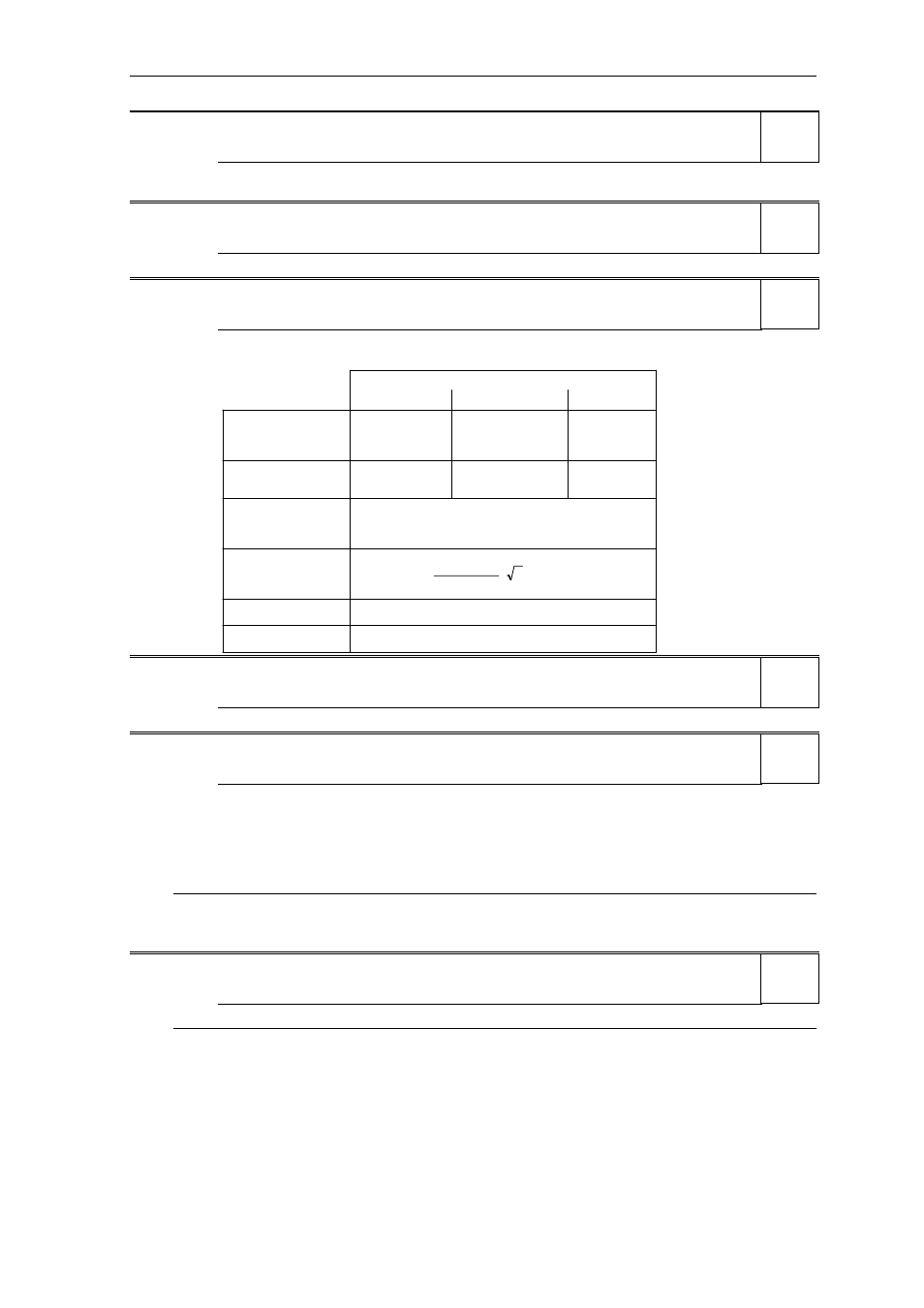
r0026
CO: Act. filtered DC-link volt.
Min: -
Datatype: Float Unit:
V
Def:
-
P-Group: INVERTER
Max: -
Displays DC-link voltage.
Mains
200 - 240 V
380 - 480 V
500 - 600 V
1020 V
840 V (FS A - C)
820 V (FS D - F)
820 V (FS FX, GX)
420 V (FS A - C)
410 V (FS D - F)
U
DC_max_trip
F0002
U
DC_min_trip
F0003
215 V
430 V (FS A - F)
380 V (FS FX, GX)
530 V
U
DC_max_warn
A0502
U
DC_max_ctrl
(P1240)
P0210
2
100
[%]
P1245
⋅
⋅
r1242
U
DC_min_warn
A0503
U
DC_min_ctrl
(P1240)
U
DC_Comp
(P1236)
r1242
0.98
⋅
U
DC_Chopper
(P1237)
r1242
0.98
⋅
r0027
CO: Act. filtered output current
Min: -
Datatype: Float Unit:
A
Def:
-
P-Group: CONTROL
Max: -
Displays [rms] value of motor current [A].
r0029
CO: Act. filtered current Isd
Min: -
Datatype: Float Unit:
A
Def:
-
P-Group: CONTROL
Max: -
Displays flux-generating current component.
The flux-generating current component is based on the nominal flux, which is calculated from the motor
parameters (P0340 - Calculation of motor parameters).
Dependency:
Applies when vector control is selected in P1300 (control mode); otherwise, the display shows the value
zero.
Note:
The flux-generating current component is generally constant up to the base speed of the motor; above base
speed, this component is weakened (field weakening) thus enabling an increase in motor speed but at
reduced torque.
r0030
CO: Act. filtered current Isq
Min: -
Datatype: Float Unit:
A
Def:
-
P-Group: CONTROL
Max: -
Displays torque-generating current component.
Note:
For asynchronous motors, a limit is calculated for the torque generating current component (in conjunction
with the maximum possible output voltage (r0071), motor leakage and current field weakening (r0377)) and
this prevents motor stalling.
Level
3
Level
2
Level
2
Level
2
Level
3
Level
3