32 speed optimization, 33 reference parameters – Siemens 440 User Manual
Page 192
Parameter Description
Issue 01/06
MICROMASTER 440 Parameter List
192
6SE6400-5BB00-0BP0
3.32 Speed
optimization
P1960
Speed control optimisation
Min: 0
CStat:
CT
Datatype: U16 Unit:
-
Def:
0
P-Group: MOTOR
Active: first confirm
QuickComm.: No
Max: 1
The drive should be set into a vector mode (P1300 = 20 or 21) to carry out speed controller optimisation.
When speed controller optimisation is enabled (P1960 = 1) the warning A0542 will become active.
When the drive is next started it will do the optimisation tests. The drive will accelerate the motor to 20 % of
P0310 (rated motor frequency) using the ramp up time P1120 and then under torque control go to 50 % of
P0310 (rated motor frequency). The drive will then ramp back down to 20 % using the ramp down time
P1121. This procedure is repeated several times and then average time taken. From this an estimation of
the inertia of the load on the motor can be derived. From this the inertia ratio parameter (P0342) and the Kp
gains for VC (P1460) and SLVC (P1470) are modified to give a response suitable for the measured inertia.
Possible Settings:
0 Disabled
1 Enabled
Note:
-
When the test is complete P1960 will be cleared to zero.
-
If there is a problem due to instability the drive may trip with an F0042 fault if a stable value has not
been obtained on the ramp up within a reasonable time.
-
It should be noted that the DC-link controller should be enabled whilst doing the test as otherwise
overvoltage trips maybe experienced. This will however depend on the ramp down time and the system
inertia.
-
The speed loop optimisation may not be suitable for some applications due to the nature of the test i.e.
accelerating under torque control from 20 % to 50 %.
3.33 Reference
parameters
P2000[3] Reference
frequency
Min: 1.00
CStat:
CT
Datatype: Float Unit:
Hz
Def:
50.00
P-Group: COMM
Active: first confirm
QuickComm.: No
Max: 650.00
Parameter P2000 represents the reference frequency for frequency values which are displayed/transferred
as a percentage or a hexadecimal value. Where:
-
hexadecimal 4000 H ==> P2000 (e.g.: USS-PZD)
-
percentage 100 % ==> P2000 (e.g.: ADC)
Index:
P2000[0] : 1st. Drive data set (DDS)
P2000[1] : 2nd. Drive data set (DDS)
P2000[2] : 3rd. Drive data set (DDS)
Example:
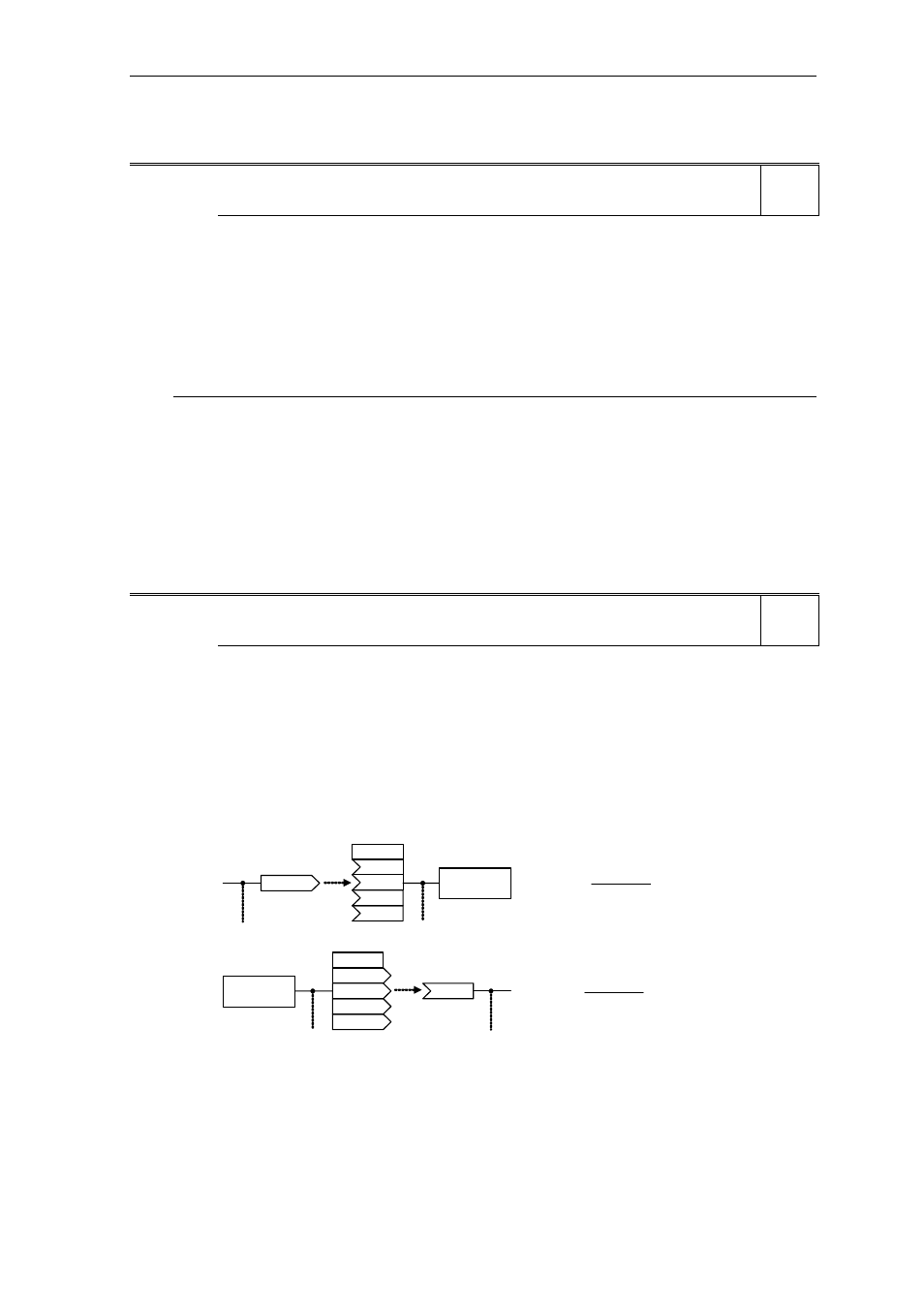
If a BICO connection is made between two parameters or alternatively using P0719 or P1000, the "unit" of
the parameters (standardized (Hex) or physical (i.e. Hz) values) may differ. MICROMASTER implicitly
makes an automatic conversion to the target value.
P1070
y[Hz]
2000
P
4000[Hex]
r2015[1]
y[Hz]
⋅
=
r2015
[0]
[1]
[2]
[3]
P2016
[0]
[1]
[2]
[3]
r0021
x[Hz]
y[Hex]
x[Hex]
]
Hex
[
4000
P2000[Hz]
r0021[Hz]
y[Hex]
⋅
=
USS-PZD
BOP link
USS-PZD
BOP link
Level
3
Level
2