2 droop, Parameter description issue 01/06, R1482 co: integral output of n-ctrl – Siemens 440 User Manual
Page 170
Parameter Description
Issue 01/06
MICROMASTER 440 Parameter List
170
6SE6400-5BB00-0BP0
r1482
CO: Integral output of n-ctrl.
Min: -
Datatype: Float Unit:
Nm
Def:
-
P-Group: CONTROL
Max: -
Displays integral part of speed controller output.
3.29.2.2 Droop
P1488[3] Droop
input
source
Min: 0
CStat:
CUT
Datatype: U16 Unit:
-
Def:
0
P-Group: CONTROL
Active: first confirm
QuickComm.: No
Max: 3
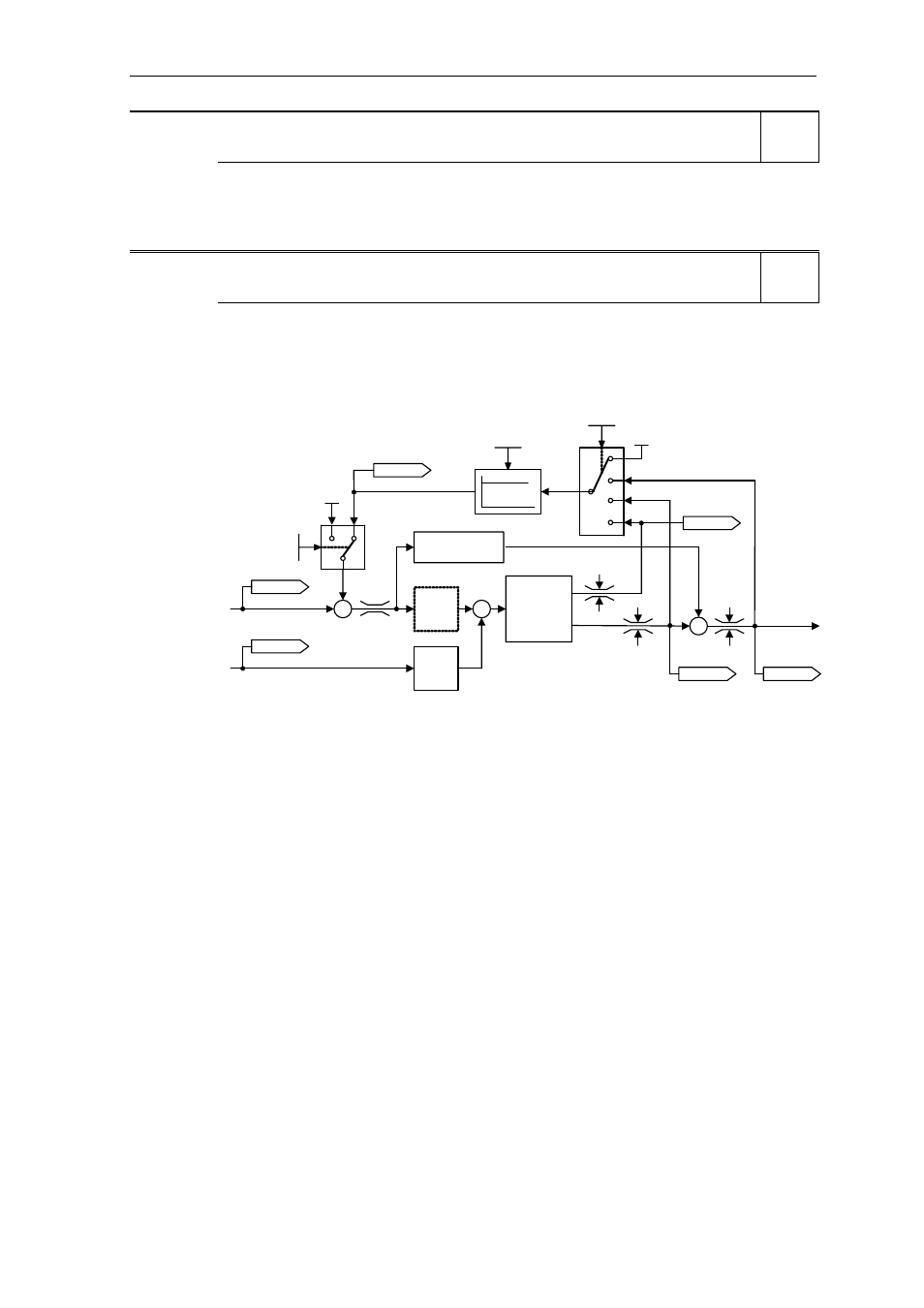
Selects source of droop input signal.
With mechanically coupled motors it is very important that an even load distribution is applied to each motor.
The load sharing can be achieved by enabling the droop function on both inverters.
–
Torque
setpoint
Act. frequency
–
Filter
r1538
r1539
Pre-
control
Freq. setpoint
Filter
PI
Speed
controller
Droop input source
0 ... 3
P1488.D (0)
Droop scaling
0.0 ... 0.50
P1489.D (0.05)
0
2
1
3
0
0
1
r1490
CO: Droop freq. [Hz]
0
Enable droop
0 ... 1
P1492.D (0)
r1538
r1539
r1538
r1539
r0079
r1508
r1482
r0063
r1170
*)
*) only active, if pre-control is enabled
(P1496 > 0)
1. Droop is applied as a frequency setpoint on each inverter.
The droop increases the slip via the negative feedback of the torque setpoint to the frequency setpoint.
In a steady-state an even load distribution can be achieved if the slip characteristics are identical.
-
P1488 > 0
-
P1489 > 0
-
P1492 = 1
2. Droop can act as a setpoint or limitation for a group of inverters (i.e. master-slave inverters)
By use of the master-slave inverter technique an even load distribution is achieved across the whole
application.
This is accomplished by setting the torque setpoint (r1490) on the master inverter which then controls
the frequency of the master inverter and all connected slave inverters.
-
P1488 > 0
-
P1489 > 0
-
P1492 = 0
Possible Settings:
0
Droop input disabled
1 Torque
setpoint
2 Speed
controller
output
3
Speed controller integral output
Index:
P1488[0] : 1st. Drive data set (DDS)
P1488[1] : 2nd. Drive data set (DDS)
P1488[2] : 3rd. Drive data set (DDS)
Dependency:
Droop scaling (P1489) must be > 0 for droop to be effective.
Level
3
Level
3