Siemens 440 User Manual
Page 123
Issue 01/06
Parameter Description
MICROMASTER 440 Parameter List
6SE6400-5BB00-0BP0
123
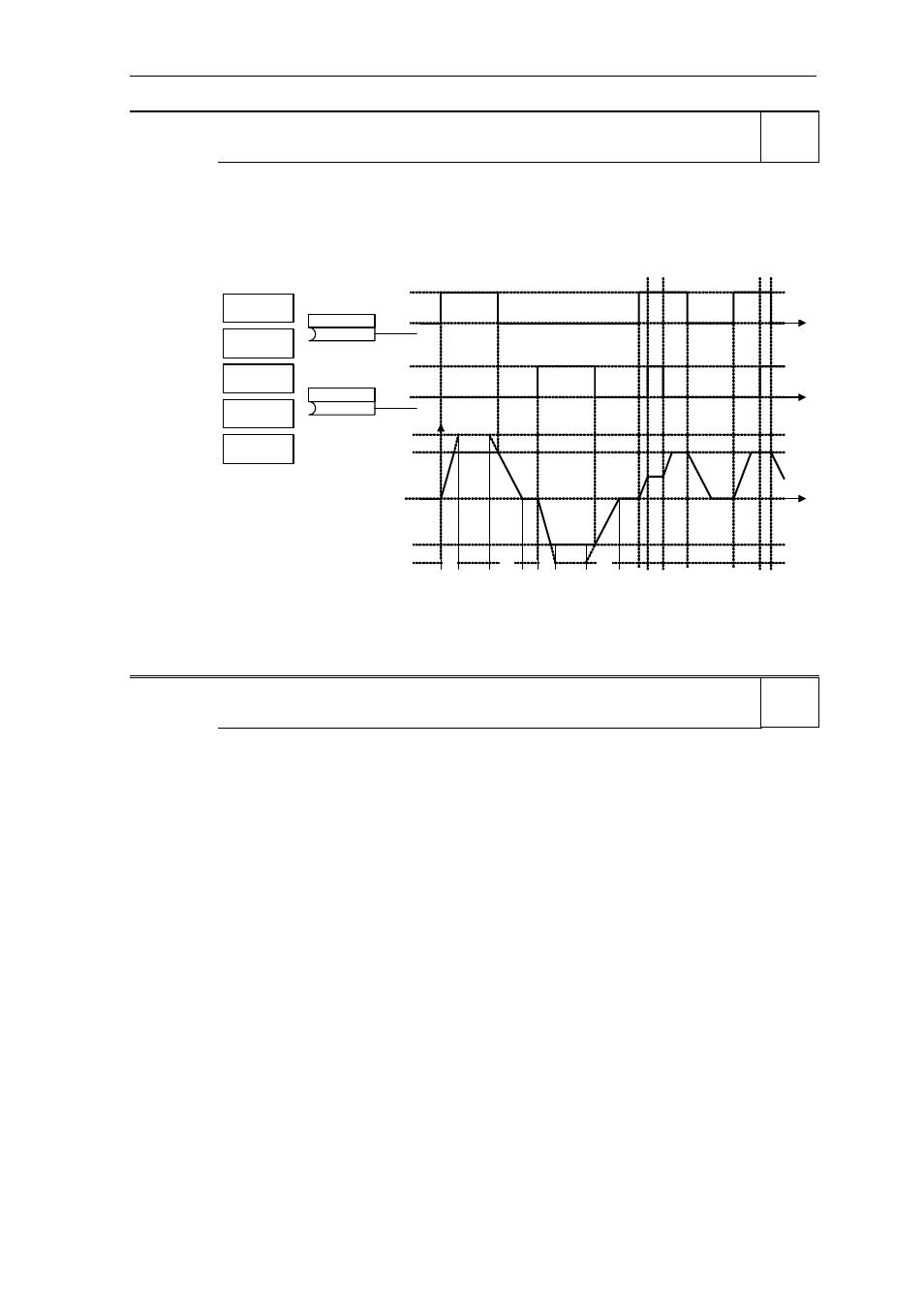
P1058[3]
JOG frequency right
Min: 0.00
CStat:
CUT
Datatype: Float Unit:
Hz
Def:
5.00
P-Group: SETPOINT
Active: Immediately
QuickComm.: No
Max: 650.00
Jogging increases the motor frequency by small amounts. The JOG buttons uses a non-latching switch on
one of the digital inputs to control the motor frequency.
If JOG clockwise (jogging clockwise) or JOG counter-clockwise is selected, the speed is increased until the
value, set in P1058 is reached.
JOG right
f
P1058
P1059
A0923
A0923
P
1060
P
1060
(0)
P1055
(0)
P1056
"1"
"0"
"1"
"0"
t
t
t
P
1061
DIN
BOP
USS
BOP link
USS
COM link
CB
COM link
JOG left
P1082
-P1082
P
1061
Index:
P1058[0] : 1st. Drive data set (DDS)
P1058[1] : 2nd. Drive data set (DDS)
P1058[2] : 3rd. Drive data set (DDS)
Dependency:
P1060 and P1061 set up and down ramp times respectively for jogging.
P1059[3]
JOG frequency left
Min: 0.00
CStat:
CUT
Datatype: Float Unit:
Hz
Def:
5.00
P-Group: SETPOINT
Active: Immediately
QuickComm.: No
Max: 650.00
While JOG left is selected, this parameter determines the frequency at which the inverter will run.
Index:
P1059[0] : 1st. Drive data set (DDS)
P1059[1] : 2nd. Drive data set (DDS)
P1059[2] : 3rd. Drive data set (DDS)
Dependency:
P1060 and P1061 set up and down ramp times respectively for jogging.
Level
2
Level
2