Parameter description issue 01/06, R2489 act. number of shaft revolutions – Siemens 440 User Manual
Page 240
Parameter Description
Issue 01/06
MICROMASTER 440 Parameter List
240
6SE6400-5BB00-0BP0
P2484[3]
No. of shaft turns = 1 Unit
Min: 0.01
CStat:
CUT
Datatype: Float Unit:
-
Def:
1.00
P-Group: CONTROL
Active: first confirm
QuickComm.: No
Max: 9999.99
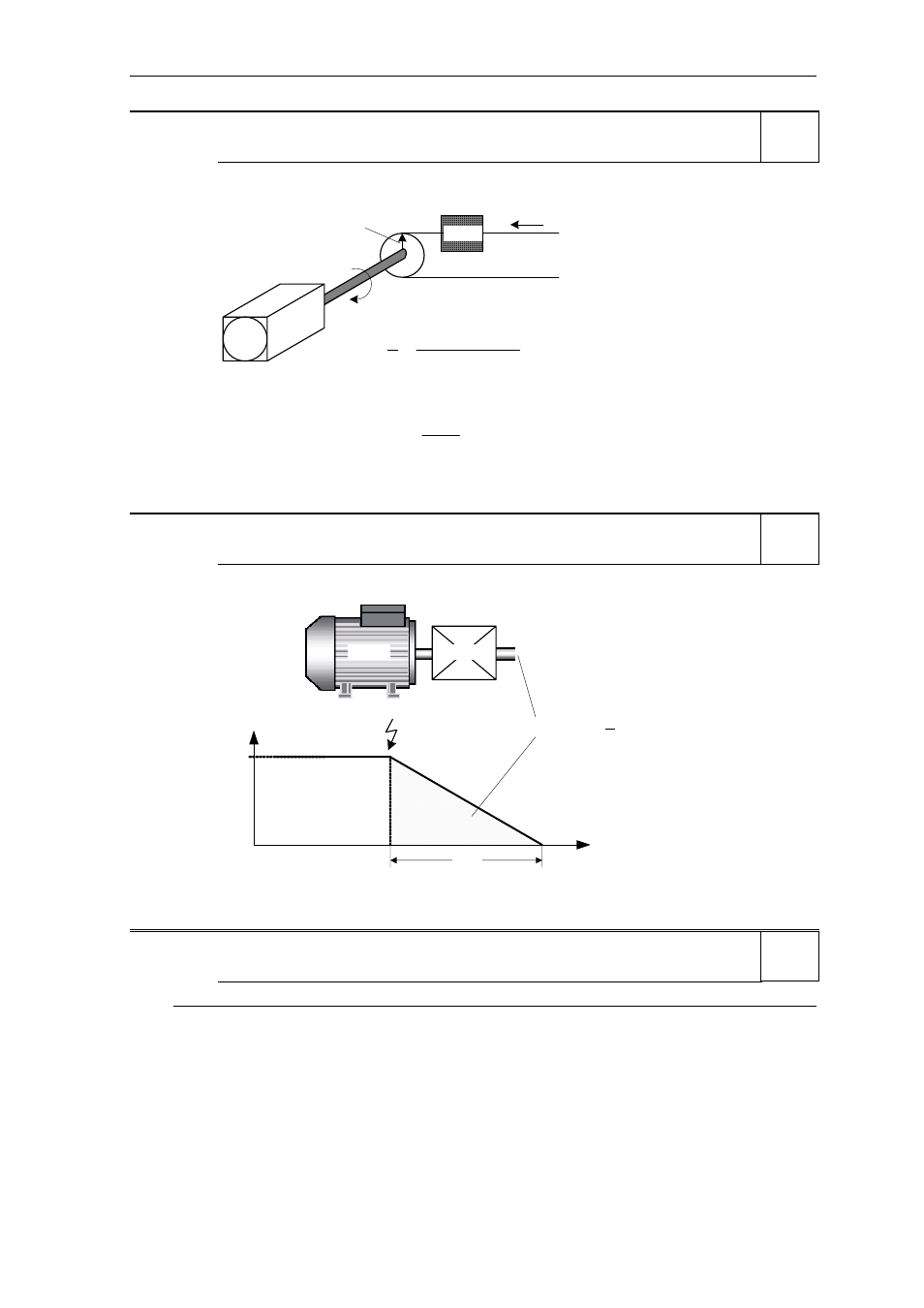
Sets the number of rotations of the motor shaft required to represent 1 unit of user selected units.
=
=
s
U
P2484
Load
Mo
tor
Pulley radius r
No. of revolutions
1 [unit]
U
Distance s
The following equation determines the number of motor shaft revolutions to stop:
2482
P
2481
P
2484
P
2488
P
⋅
⋅
=
Revolutions
Motor
Index:
P2484[0] : 1st. Drive data set (DDS)
P2484[1] : 2nd. Drive data set (DDS)
P2484[2] : 3rd. Drive data set (DDS)
P2488[3]
Distance / No. of revolutions
Min: 0.01
CStat:
CUT
Datatype: Float Unit:
-
Def:
1.00
P-Group: CONTROL
Active: first confirm
QuickComm.: No
Max: 9999.99
Sets the required distance or number of revolutions (see P2484).
Motor
Gear
f
⋅
=
=
2
1
P2488
s
t
OFF1
f
OFF1
.
t
P2488
.
t
P2488
f
OFF1
Index:
P2488[0] : 1st. Drive data set (DDS)
P2488[1] : 2nd. Drive data set (DDS)
P2488[2] : 3rd. Drive data set (DDS)
r2489
Act. number of shaft revolutions
Min: -
Datatype: Float Unit:
-
Def:
-
P-Group: CONTROL
Max: -
Displayes the actual number of shaft revolutions since trigger of positioning.
Note:
Positioning ramp down is an open loop control method. So, there might be a difference between the position
setpoint and the calculated actual position shown in r2489. That means, it could happen that the setpoint
position is already reached, although r2489 displays a different actual position .
Level
3
Level
3
Level
3