2 field-orientated vector control – Siemens 440 User Manual
Page 167
Issue 01/06
Parameter Description
MICROMASTER 440 Parameter List
6SE6400-5BB00-0BP0
167
3.29.2
Field-orientated vector control
P1400[3]
Configuration of speed control
Min: 0
CStat:
CUT
Datatype: U16 Unit:
-
Def:
1
P-Group: CONTROL
Active: Immediately
QuickComm.: No
Max: 3
Configuration for speed control.
Bitfields:
Bit00 Automatic Kp adaption 0 NO 1 YES
Bit01 Integral freeze (SLVC) 0 NO 1 YES
Index:
P1400[0] : 1st. Drive data set (DDS)
P1400[1] : 2nd. Drive data set (DDS)
P1400[2] : 3rd. Drive data set (DDS)
Note:
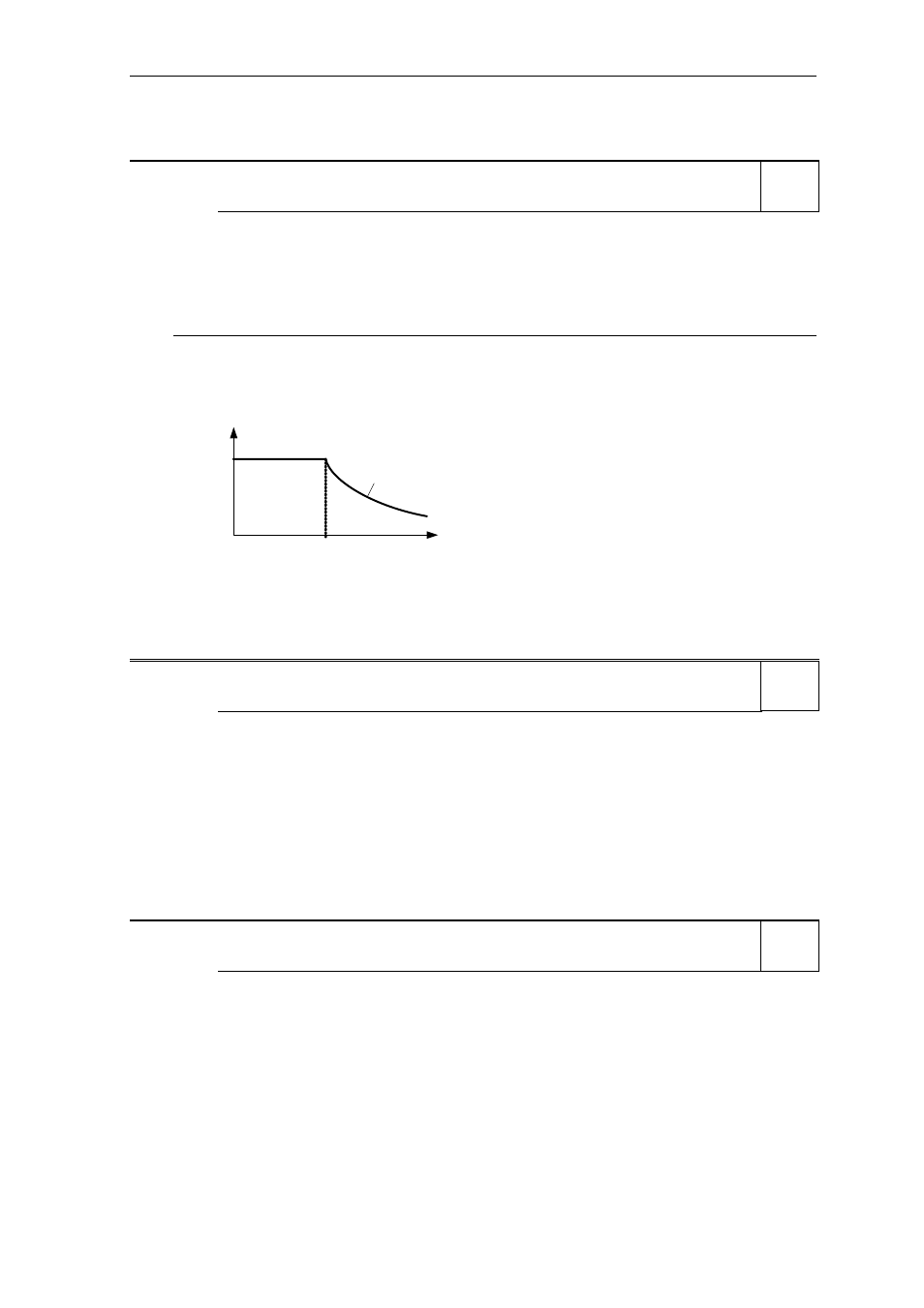
P1400 Bit 00 = 1:
Automatic gain adaption of speed controller is enabled. In the area of field weakening the gain is reduced in
dependence on flux.
Kp
f
N
f(
Φ
)
P1400 Bit01 = 1:
The integrator of the speed controller is frozen if Sensorless Vector Control (SLVC) is selected and the
control is switched from closed-loop to open-loop operation.
Advantage:
The correct amount of slip compensation is calculated and applied to the open-loop function for a motor
under load.
r1407
CO/BO: Status 2 of motor control
Min: -
Datatype: U16 Unit:
-
Def:
-
P-Group: CONTROL
Max: -
Displays status of motor control, which can be used to diagnose inverter status.
Bitfields:
Bit00 V/f control enable 0 NO 1 YES
Bit01 SLVC enable 0 NO 1 YES
Bit02 Torque control enable 0 NO 1 YES
Bit05 Stop I-comp. speed control 0 NO 1 YES
Bit06 Set I-comp. speed controller 0 NO 1 YES
Bit08 Upper torque limit active 0 NO 1 YES
Bit09 Lower torque limit active 0 NO 1 YES
Bit10 Enable droop 0 NO 1 YES
Bit15 DDS change active 0 NO 1 YES
Details:
See P052 (CO/BO: Status word 1)
r1438
CO: Freq. setpoint to controller
Min: -
Datatype: Float Unit:
Hz
Def:
-
P-Group: CONTROL
Max: -
Displays setpoint of speed controller.
Level
3
Level
3
Level
3