Siemens 440 User Manual
Page 181
Issue 01/06
Parameter Description
MICROMASTER 440 Parameter List
6SE6400-5BB00-0BP0
181
P1582[3]
Smooth time for flux setpoint
Min: 4
CStat:
CUT
Datatype: U16 Unit:
ms
Def:
15
P-Group: CONTROL
Active: Immediately
QuickComm.: No
Max: 500
Sets time constant of PT1 filter to smooth flux setpoint.
Index:
P1582[0] : 1st. Drive data set (DDS)
P1582[1] : 2nd. Drive data set (DDS)
P1582[2] : 3rd. Drive data set (DDS)
r1583
CO: Flux setpoint (smoothed)
Min: -
Datatype: Float Unit:
%
Def:
-
P-Group: CONTROL
Max: -
Displays smoothed flux setpoint in [%] relative to rated motor flux.
P1596[3]
Int. time field weak. controller
Min: 20
CStat:
CUT
Datatype: U16 Unit:
ms
Def:
50
P-Group: CONTROL
Active: Immediately
QuickComm.: No
Max: 32001
Sets integral time for field weakening controller.
Index:
P1596[0] : 1st. Drive data set (DDS)
P1596[1] : 2nd. Drive data set (DDS)
P1596[2] : 3rd. Drive data set (DDS)
r1597
CO: Outp. field weak. controller
Min: -
Datatype: Float Unit:
%
Def:
-
P-Group: CONTROL
Max: -
Displays output signal of field weakening controller in [%] relative to rated motor flux.
r1598
CO: Flux setpoint (total)
Min: -
Datatype: Float Unit:
%
Def:
-
P-Group: CONTROL
Max: -
Displays total flux setpoint in [%] relative to the rated motor flux.
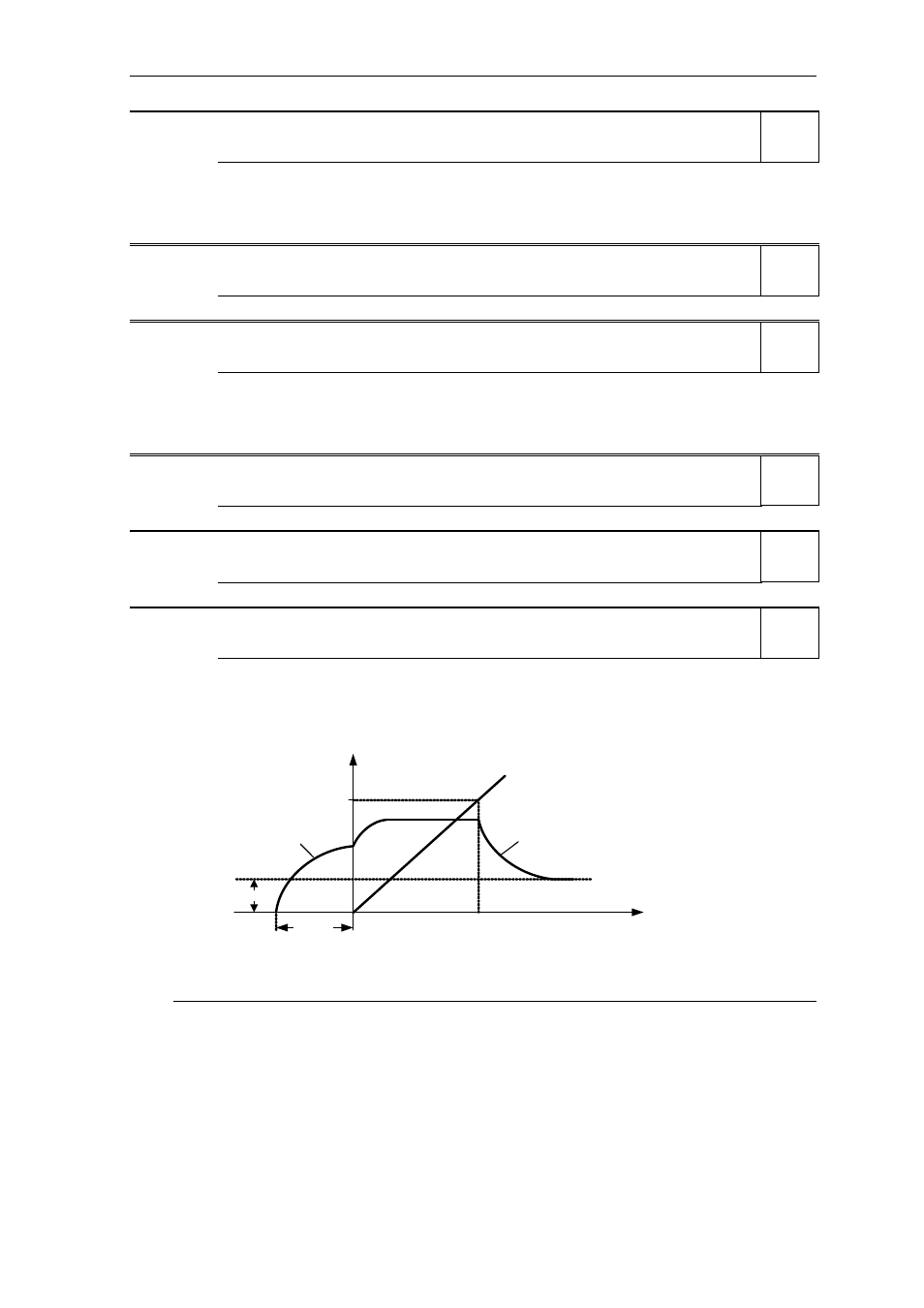
P1610[3]
Continuous torque boost (SLVC)
Min: 0.0
CStat:
CUT
Datatype: Float Unit:
%
Def:
50.0
P-Group: CONTROL
Active: Immediately
QuickComm.: No
Max: 200.0
Sets the constant torque boost for the low frequency range when sensorless closed-loop vector control is
being used (SLVC). The parameter is entered as a % referred to the rated motor torque (r0333).
For sensorless closed-loop vector control, when the motor model is disabled, an absolute current is
impressed. P1610 represents the maximum load that occurs at a constant setpoint.
f
t
P1755
i
sd
f(t)
i
sd
(t)
i
sd
(P1610, P1611)
P1610 = P1611 = 0
r0331
P0346
Index:
P1610[0] : 1st. Drive data set (DDS)
P1610[1] : 2nd. Drive data set (DDS)
P1610[2] : 3rd. Drive data set (DDS)
Caution:
P1610 should always be set at least 10% higher than the maximum steady-state load that occurs.
Note:
-
For P1610 = 0 %, a current setpoint is calculated that corresponds to the no-load case (rated
magnetization current).
-
For P1610 = 100 %, a current setpoint is calculated that corresponds to the rated motor torque.
Level
3
Level
4
Level
3
Level
4
Level
3
Level
2