Siemens 440 User Manual
Page 233
Issue 01/06
Parameter Description
MICROMASTER 440 Parameter List
6SE6400-5BB00-0BP0
233
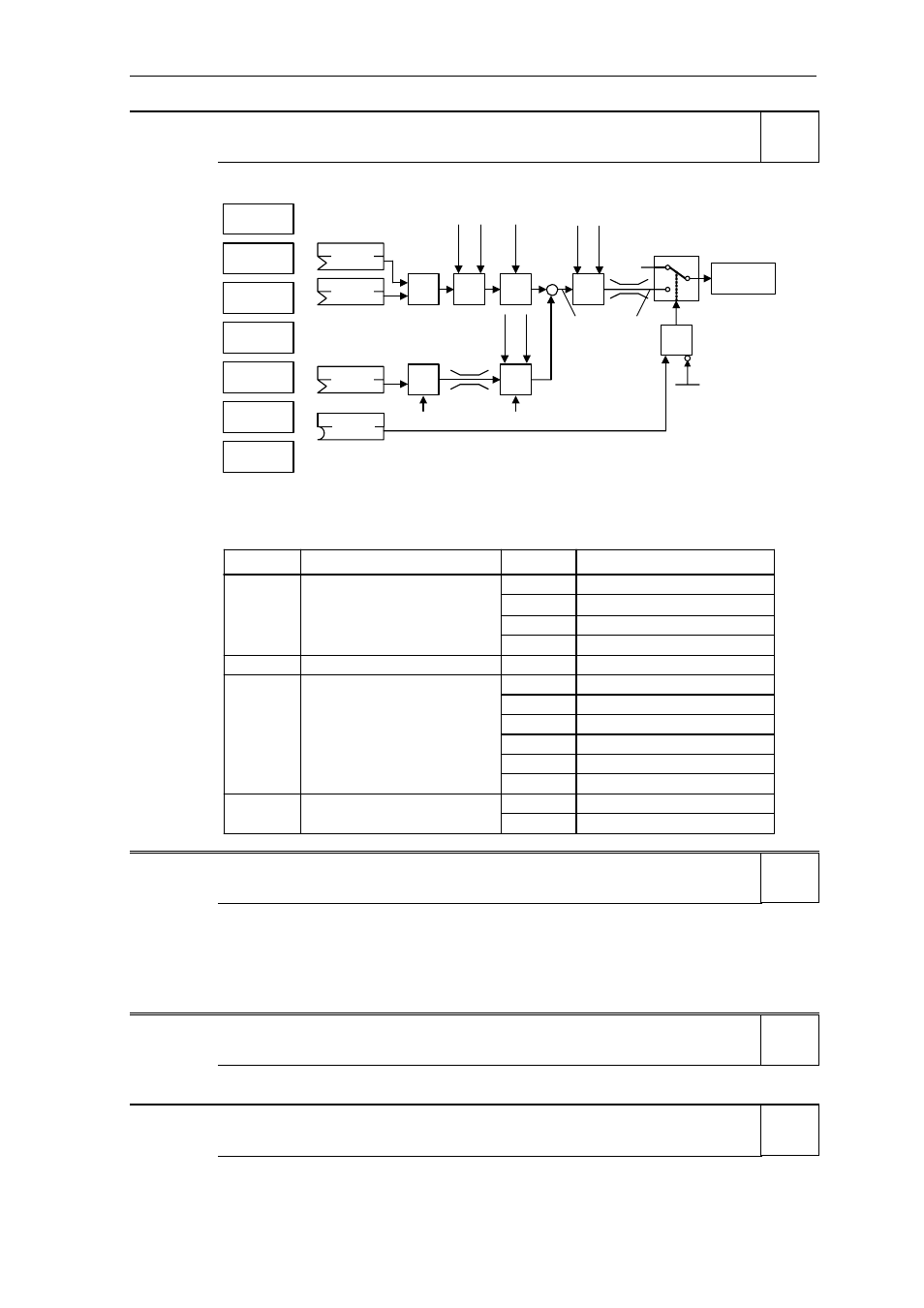
P2253[3]
CI: PID setpoint
Min: 0:0
CStat:
CUT
Datatype: U32 Unit:
-
Def:
0:0
P-Group: TECH
Active: first confirm
QuickComm.: No
Max: 4000:0
Defines setpoint source for PID setpoint input.
PID
MOP
ADC
PID
SUM
PID
PID
FF
USS
BOP link
USS
COM link
CB
COM link
ADC2
P2254
P2253
PID
RFG
PID
PT1
−∆
PID
P2200
P2264
PID
PT1
PID
SCL
&
P2251
Output
PID
0
1
Motor
control
P
2257
P
2258
P
2261
P2271
P
2269
P
2270
P2265
P
2280
P
2285
0
Index:
P2253[0] : 1st. Command data set (CDS)
P2253[1] : 2nd. Command data set (CDS)
P2253[2] : 3rd. Command data set (CDS)
Common Settings:
Parameter
BI: Enable PID controller
P2200
Parameter text
Setting
Meaning
0
PID controller always active
1.0
CI: PID setpoint
P2253
Analog input 1
755.0
USS on BOP link
2015.1
USS on COM link
2019.1
CB on COM link
2050.1
CI: PID feedback
P2264
755.0
Analog input 1
Analog input 2
755.1
PID mode
P2251
0
PID as setpoint
2224
Fixed PID setpoint (PID-FF)
PID-MOP
2250
PID controller de-activated
BICO
Digital input x
722.x
BICO parameter
P2254[3]
CI: PID trim source
Min: 0:0
CStat:
CUT
Datatype: U32 Unit:
-
Def:
0:0
P-Group: TECH
Active: first confirm
QuickComm.: No
Max: 4000:0
Selects trim source for PID setpoint. This signal is multiplied by the trim gain and added to the PID setpoint.
Index:
P2254[0] : 1st. Command data set (CDS)
P2254[1] : 2nd. Command data set (CDS)
P2254[2] : 3rd. Command data set (CDS)
Common Settings:
See parameter P2253
P2255
PID setpoint gain factor
Min: 0.00
CStat:
CUT
Datatype: Float Unit:
-
Def:
100.00
P-Group: TECH
Active: Immediately
QuickComm.: No
Max: 100.00
Gain factor for PID setpoint. The PID setpoint input is multiplied by this gain factor to produce a suitable
ratio between setpoint and trim.
P2256
PID trim gain factor
Min: 0.00
CStat:
CUT
Datatype: Float Unit:
-
Def:
100.00
P-Group: TECH
Active: Immediately
QuickComm.: No
Max: 100.00
Gain factor for PID trim. This gain factor scales the trim signal, which is added to the main PID setpoint.
Level
2
Level
3
Level
3
Level
3