Parameter description issue 01/06, P2257 ramp-up time for pid setpoint, P2258 ramp-down time for pid setpoint – Siemens 440 User Manual
Page 234: R2260 co: pid setpoint after pid-rfg
Parameter Description
Issue 01/06
MICROMASTER 440 Parameter List
234
6SE6400-5BB00-0BP0
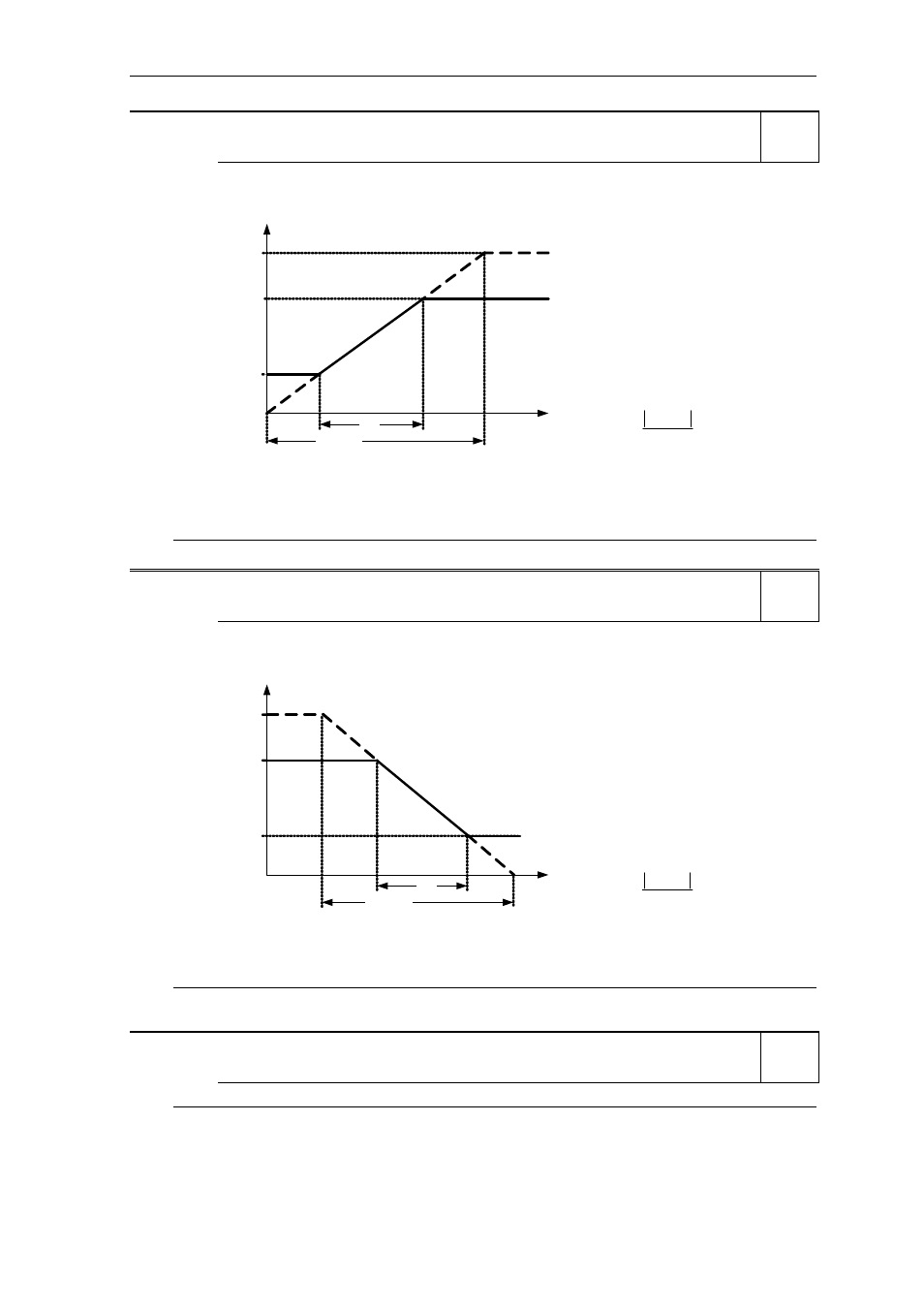
P2257
Ramp-up time for PID setpoint
Min: 0.00
CStat:
CUT
Datatype: Float Unit:
s
Def:
1.00
P-Group: TECH
Active: Immediately
QuickComm.: No
Max: 650.00
Sets the ramp-up time for the PID setpoint.
PID Setpoint (%)
0
100 %
t (s)
x
2
x
1
P2257
t
12
P2257
%
100
x
x
t
1
2
12
⋅
−
=
Dependency:
P2200 = 1 (PID control is enabled) disables normal ramp-up time (P1120).
PID ramp time effective only on PID setpoint and only active
-
when PID setpoint is changed or
-
when RUN command is given.
Notice:
Setting the ramp-up time too short may cause the inverter to trip, on overcurrent for example.
P2258
Ramp-down time for PID setpoint
Min: 0.00
CStat:
CUT
Datatype: Float Unit:
s
Def:
1.00
P-Group: TECH
Active: Immediately
QuickComm.: No
Max: 650.00
Sets ramp-down time for PID setpoint.
PID Setpoint (%)
0
100 %
t (s)
x
2
x
1
P2258
t
21
P2258
%
100
x
x
t
2
1
21
⋅
−
=
Dependency:
-
P2200 = 1 (PID control is enabled) disables normal ramp-up time (P1120).
-
PID setpoint ramp effective only on PID setpoint changes.
-
P1121 (ramp-down time) and P1135 (OFF3 ramp-down time) define the ramp times used after OFF1
and OFF3 respectively.
Notice:
Setting the ramp-down time too short can cause the inverter to trip on overvoltage (F0002) / overcurrent
(F0001).
r2260
CO: PID setpoint after PID-RFG
Min: -
Datatype: Float Unit:
%
Def:
-
P-Group: TECH
Max: -
Displays total active PID setpoint after PID-RFG in [%].
Note:
r2260 = 100 % corresponds to 4000 hex
Level
2
Level
2
Level
2