Using the rotary motor window – Rockwell Automation 2098-UWCPRG Ultraware Software User Manual User Manual
Page 335
Rockwell Automation Publication 2098-UM001G-EN-P - February 2011
337
Creating Custom Motors Chapter 7
Using the Rotary Motor
Window
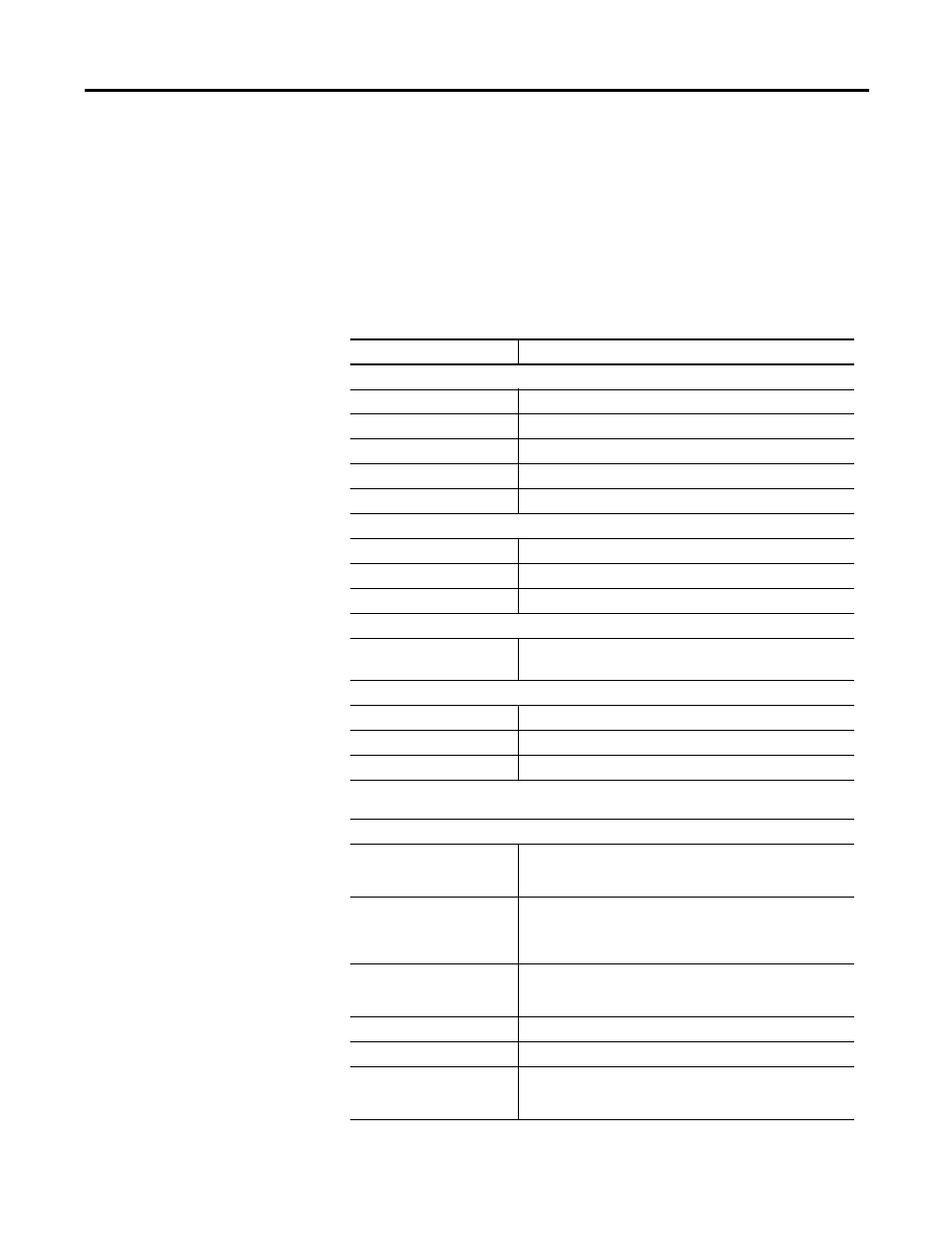
The Rotary Motor window configures a custom motor by entering motor
parameters, or to edit an existing motor's parameter set.
Standard motors are opened in a read-only mode. If a motor is duplicated, it
becomes a custom motor with a default model name consisting of the duplicated
motor's model with _copy n appended (for example, Std-Rotary_copy 1).
The following parameters can be entered and edited in the Rotary Motor
window.
Parameter Description
General
Model:
Model number or name up to 32 digits in length
Standard Motor:
Checked if standard Rockwell Automation motor.
Torque Constant:
0.00024…15.9998 N-m/A
Inertia:
0.00001…65535.999 Kg-cm^2
Poles per Revolution:
even numbers from 2…100
Electrical
Resistance:
0.0039…255.996 Ohms
Inductance:
0.0039…255.996 mH
Rated Voltage:
100…1000 Volts
Flux Saturation
1/8, 1/4, 3/8, 1/2, 5/8, 3/4, 7/
8, and Peak Current
0.000…1.000
Set all flux saturation levels for custom motors to 1.000.
Ratings
Maximum Speed:
300…32767 rpm
Intermittent Current:
0.008…255.99 Amps
Continuous Current
0.008…255.99 Amps
Note: All units relative to current (Amps) are based upon 0 to Peak of the sine wave (not RMS
units). Winding data values are phase-to-phase.
Feedback
Encoder Type:
The type of encoder provides motor feedback:
• Incremental
• Sine/Cosine
Commutation Type:
The type of commutation for the motor:
• Brush
• Trapezoidal
• Sinusoidal
Startup Type:
The start-up commutation algorithm for the motor:
• Self-Sensing
• Hall Inputs
Hall Input Offset:
0…359º
Lines Per Revolution:
100…64,000 lines
Integral Limits:
Check when feedback has integral limit switches. For example,
if the motor has built-in overtravel limits which are interfaced to
the Ultra drive's Encoder (CN2) connector.